1. Introduction
Sandy beaches are constantly adapting to changing wave forcing over a variety of temporal scales [
1,
2,
3], which can be traced in changes in cross-shore shoreline positions. Coastal variability, and particularly erosion, can expose human and ecosystems in the littoral zone to risk, which implies that understanding and predicting shoreline evolution is of paramount importance. However, it is not straightforward to predict shoreline variability at a multitude of natural temporal scales from storm events to seasonal and inter-annual evolution because the governing processes are complex. On top of that, there is often a lack of sufficient observations of shoreline change, which hampers the prediction of shoreline variability even more. Furthermore, these observational strategies generally focus on a particular spatial-temporal scale (e.g., monthly observations at a certain shoreline transect or short-term field campaigns [
4,
5]). The same is true for many of the equilibrium-based shoreline models [
6] that are optimized during the calibration process for the single most dominant timescale of shoreline variability in the training set. Quite often this results in models being skillful at either the short-term (e.g., storm or monsoon) timescale or optimized for the longer (seasonal to inter-annual) timescales [
7]. Addressing all the timescales together is a major challenge and as a result, current understanding on how the shorelines respond to different timescales and how these timescales influence shoreline change is limited.
The understanding and prediction of coastal evolution are often simulated using models that simulate hydrodynamics linked to morphodynamics that can roughly be divided into three categories: the more complex and time-consuming process-based models [
8,
9,
10,
11], hybrid models (usually based on the equilibrium concept [
6,
12,
13]) and, more recently, machine learning models [
6,
14]. Each of these models are typically bound to the dominant spatial and temporal scales of key processes to model, and as a result they struggle, or become too computational expensive, in order to account for dynamics at different timescales. Hybrid (equilibrium) models are generally more computationally efficient in comparison to process-based models and have been proven reliable on seasonal or inter-annual timescales to simulate shoreline behavior [
15,
16,
17,
18,
19]. However, they typically account for a single dominant physical process and need a large, site-specific dataset for calibration purposes [
20]. Another limitation to these models is that only coastal processes observed during the calibration timeframe are accounted for [
21]. Moreover, hybrid models do not explicitly account for all individual processes that drive shoreline change but seek an overall behavior pattern as a response to the different processes.
The single-timescale equilibrium ShoreFor model [
17] (SF-ST, see
Appendix A for a model description) seeks the best relation between the raw wave forcing and raw shoreline position data through the fitting of several calibration parameters (
c and
φ) using the knowledge of how the beach responds to incoming wave forcing. For example, a beach in equilibrium with the current and antecedent forcing conditions will try to adapt to a new equilibrium if wave conditions change, like in the case of a high-intensity forcing event (e.g., a storm or monsoon) impacting the coastline. During such an event, the beach will erode and the shoreline moves landward. The new established shoreline is then more in equilibrium with the prevailing forcing. However, several characteristics of the high-intensity forcing event play a role in how the (modelled) shoreline position responds to the considered wave forcing. The first aspect is the forcing duration: only if the duration is long enough (i.e., stationary conditions), a new equilibrium is established. Secondly, the intensity of the wave forcing determines how far the beach retreats. Thirdly, in the case of multiple high-intensity forcing events, the sequence of these forcing events (e.g., a storm cluster) determines to a large extent the shoreline change [
16]. A prerequisite, for the sequencing to be important, is that the beach has no time to fully recover in between the high-intensity forcing events that make up the cluster [
22,
23]. To what extent a beach recovers from the antecedent high-intensity forcing conditions mainly depends on the characteristics of the post-storm hydrodynamic conditions relative to the antecedent conditions [
24].
Within SF-ST, the key model-free parameter is the memory decay factor (
φ), which indicates the single most dominant response time of cross-shore sediment exchange. However, due to this single memory decay factor, model skill deteriorates considerably if multiple dominant forcing and beach response timescales are present [
3,
19,
21]. Moreover, the SF-ST model is only applicable on locations where wave-driven, cross-shore processes dominate sediment transport and where anthropological influences are minimal [
17]. SF-ST was originally established using data in microtidal environments (see [
17]), but the subsequent model of [
18] was established covering a wide range of tidal ranges. Furthermore, [
25] showed that the model yields significant skill in reproducing post-storm recovery in a macrotidal environment as well. Nevertheless, in this paper, model training sites with a limited tidal range are used in order to minimize the influence of the tide on the shoreline location (see
Section 2).
Recent studies identified the persistent nature of short wave events on longer beach response timescales [
3,
22,
23,
26,
27,
28]. This link between the different timescales is often missing when modelling the seasonal to inter-annual evolution of the coastline and storm impact persistence. For example, extremes (e.g., storms and tropical cyclones) have both a transient and persistent impact, individually or in sequence [
27]. Moreover, [
22] showed the influence of average winter storms on beach response and revealed that not only the storm energy is important, but also the frequency of recurrence, highlighting interactions between short-term storms and long-term evolution. They showed the importance of the recurrence frequency of extremes to beach erosion and post-event reconstruction, such that the shoreline retreat was most governed by the first storm in the sequence, while the impact of subsequent forcing events was less pronounced (low cumulative impact), something that is also observed in [
29] and follows the general equilibrium response of a beach [
16,
17,
18]. Furthermore, a main outcome of recent studies in tropical South East Asia [
3,
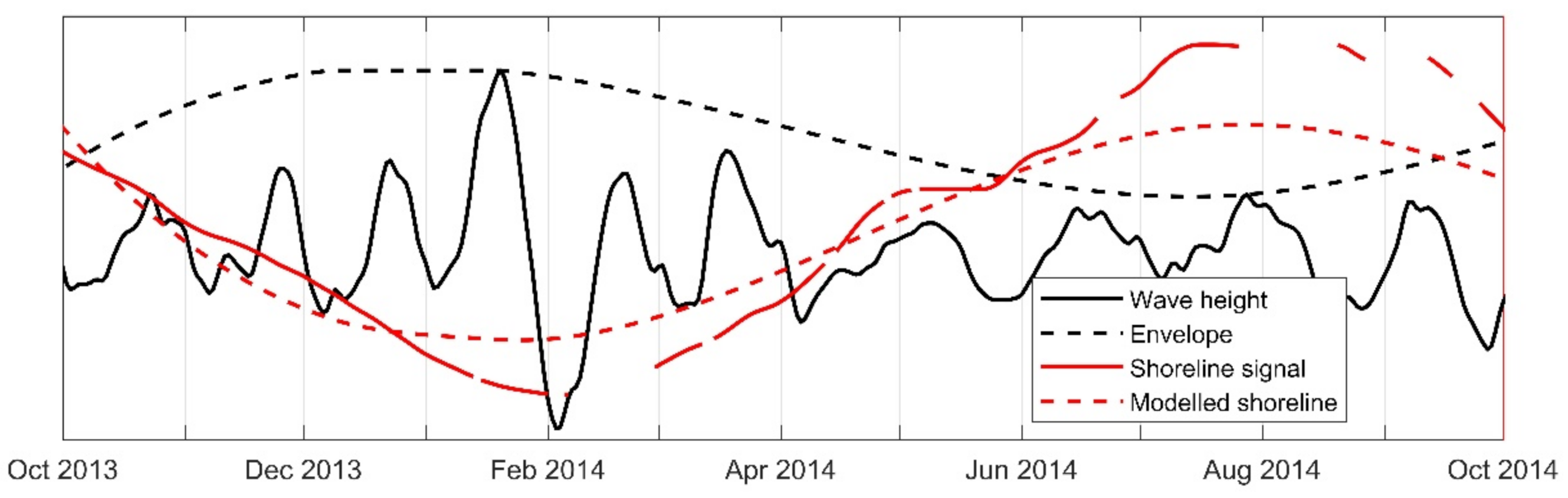
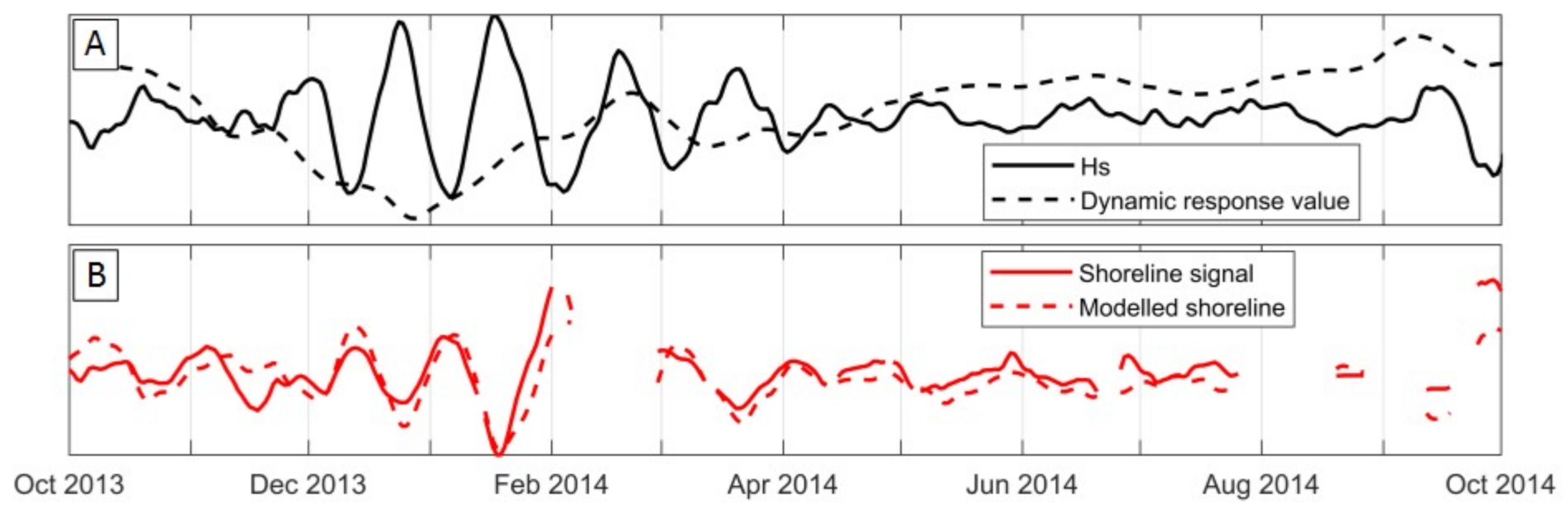
30] is the long lag (50–60 days) observed between monthly-averaged waves and shoreline location, while the envelope of intra-seasonal monsoon events is in closer phase with the shoreline location. Hence, the shoreline variation appears to be in equilibrium with energetic wave conditions, rather than the monthly-averaged waves. In this paper, we aim to account for these processes by linking different timescales in forcing and response.
Recent work by [
7,
19] showed that timescales of beach change and forcing may be temporally dependent, with beaches undergoing rapid adjustment to the changes in the dominant wave forcing over time and where single-timescale models can fail to capture the observed shoreline signal. The authors of [
19] showed that the beach at Gold Coast (Australia) was subjective to two different beach response frequencies corresponding to two consecutive 4-year time periods. The movement of the shoreline at this site changed from a seasonally-dominated mode (annual cycle) to a storm-dominated (∼monthly) mode. The authors of [
7] used an approach whereby model-free parameters are allowed to vary in time, adjusting to potential non-stationarity in the underlying model forcing. They revealed that time-varying model-free parameters are linked through physical processes to changing characteristics of the wave forcing. Here, we aim to implement the fact that beach response to dominant timescales in wave forcing may be dependent on large timescale shoreline variations by using a time dependent model-free parameter.
In this paper, we evaluate to what extent multiple timescales of dominant forcing and beach response behavior co-exist and to what extent such behaviors can interact with different timescales of forcing and response. We aim to improve cross-shore multi-timescale shoreline predictions by using the single-timescale ShoreFor model [
17] (SF-ST, see
Appendix A for a model description) as a baseline model.
2. Model Training Sites Covering Different Wave Environments
To train the SF-ST model, shoreline location and wave measurements are required. A source of shoreline data are shore-based video cameras that generally collect data during daylight on a 30 min basis [
31]. In comparison to shoreline-walking GPS surveys, these video-based shorelines provide significantly better temporal resolution, which makes video-derived shorelines particularly suitable to study the importance of different, multiple, response timescales [
2,
32].
In order to make the video data suitable for SF-ST and to cover a wide range of timescales (1 day to inter-annual timescales), the shoreline dataset at Nha Trang and all wave forcing datasets are interpolated (upsampled, corresponding to the value every 24-h), such that they have a temporal resolution of 1 day. The shoreline datasets at Narrabeen and Tairua have a daily interval corresponding to the procedures outlined in [
6,
33], respectively. Moreover, the raw shoreline position data is detrended by a second-order polynomial in order to filter out shoreline trends which have a larger temporal scale than the duration of the dataset. The importance of multiple beach response timescales will be investigated at three different study sites: Narrabeen (Australia), Nha Trang (Vietnam) and Tairua (New Zealand). These sites were chosen to cover different wave environments and for the availability of daily shoreline data. All three beaches are subjected to a small tidal range (microtidal, <2.0 m, <1.6 m and <2.0 m, respectively), such that SF-ST has an optimal model performance [
3,
34,
35], respectively. Moreover, the beach dynamics are either dominated or largely influenced by cross-shore processes. Furthermore, major differences between the wave conditions are present at the three study sites. The wave climate at Narrabeen consists of small (daily) timescale storms (and swell waves) and a larger temporal scale, but less intense seasonal cycle. At Nha Trang, three distinct wave forcing timescales are present: typhoons (daily), monsoons (monthly) and a seasonal variation (annual). At Tairua, the wave climate is largely influenced by small timescale storm and swell waves [
36].
2.1. Narrabeen-Collaroy Beach, Australia
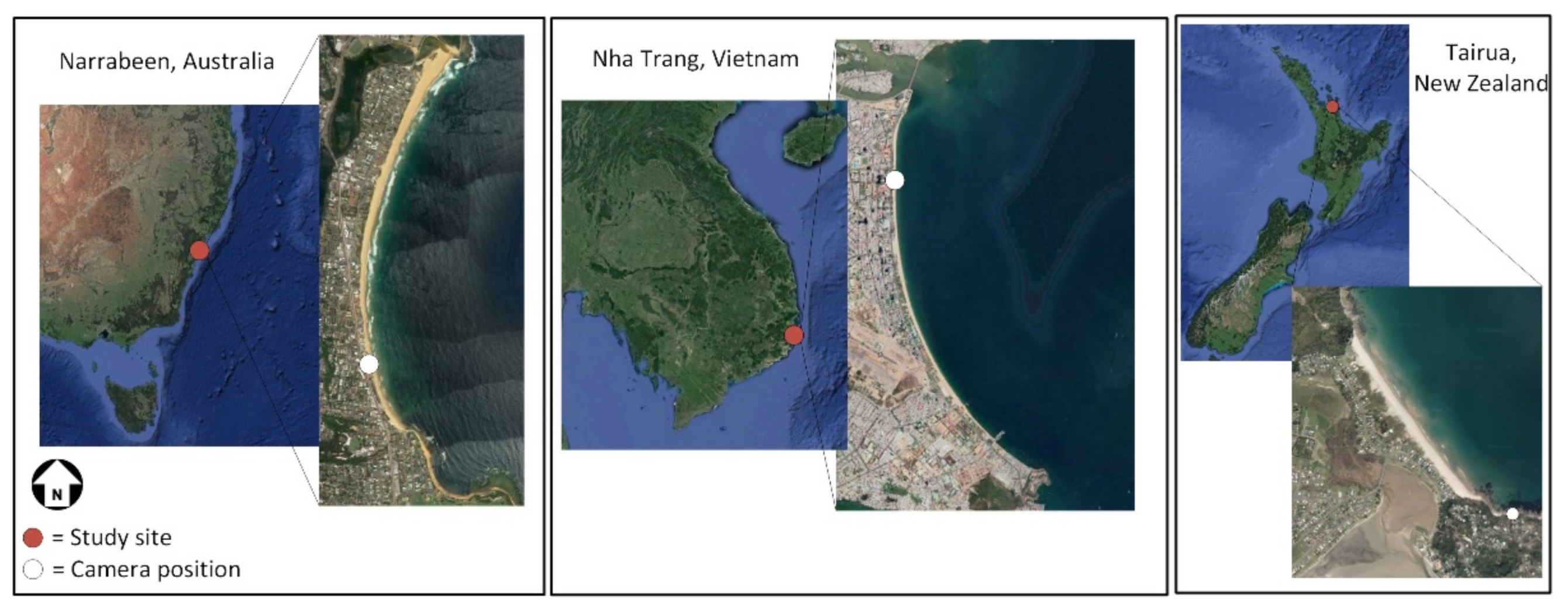
The Narrabeen-Collaroy beach (34° S) is situated near Sydney in the southeast of Australia (
Figure 1). The embayed beach is bound at the north and south by two headlands. Narrabeen beach is situated in the north of the embayment and Collaroy beach is situated in the south. In 2004, an ARGUS system [
31,
37] was installed, from which shorelines can be extracted. In this paper, alongshore averaged shoreline data a bit southwards of the center of the embayment is used (2400 m to 2800 m from the northern edge of the embayment), in line with previous studies at this beach [
17,
33]. Narrabeen beach is characterized by sand with a D50 of 0.4 mm. The wave climate is largely influenced by swells from the SSE (mean
Hs = 1.6 m and mean
Tp = 10 s). Additionally, the wave climate consists of larger waves (
Hs = 3 m) that originate from storm events and can hit the coastline in any direction. For example, in June 2007 an energetic storm sequence hit the coastline and caused roughly 35 m of shoreline retreat [
38]. Furthermore, a small seasonal cycle is present with on average higher waves in the Australian winter and milder waves in the Australian summer months [
38]. On larger timescales, effects of El-Nino Southern Oscillation (ENSO) can play a role as well [
37,
39,
40]. In this study, nearshore wave timeseries at the 10 m depth contour are used.
2.2. Nha-Trang Beach, Vietnam
A video system [
41,
42] was installed in 2013 at Nha Trang beach in Vietnam (12° N) (
Figure 1). The camera location is considered far enough for the beach not to be influenced by the edges of the bay [
3]. Cross-shore shoreline positions are estimated from this camera data on a daily basis. The shoreline location used in this paper is retrieved by alongshore averaging the video-derived shoreline data (over 75 m) from the northern part of the bay relative to the camera location. Nha Trang beach is characterized by sand with a D50 of 0.3 mm. Interestingly, the tropical wave climate at Nha Trang is characterized by multiple wave conditions with a distinct timescale, of which the seasonal variation is the most pronounced. The offshore annual mean significant wave height (
Hs) is 0.95 m, with an associated averaged peak period (
Tp) of 6.2 s. Typhoons typically occur on average 4–6 times per year between August and November. Intriguingly, typhoons were abundant in 2013, where the most extreme one occurred in November of that year [
3]. The wave climate is also characterized by summer and winter monsoons, where the summer monsoons mainly consist of wind waves and the winter monsoons of swell waves. The winter monsoons (October to April), which do not occur at the same time as the typhoons, can generate waves up to 4.0 m, which can heavily affect shoreline change. During fall and winter (October to April), the mean
Hs is 1.2 m and
Tp is 6.8 s, while during spring and summer (May to September), the mean
Hs is reduced to 0.6 m, with a shorter
Tp below 5 s [
30].
2.3. Tairua Beach, New-Zealand
Tairua Beach is situated at the east coast of New Zealand’s northern island (37° S) (
Figure 1). This 1.2 km long beach is situated in between two headlands, where on the southern headland, a video camera was installed in 1998. In this study, high-resolution shoreline data (alongshore averaged over the bay: 1050 m, see [
6]) is used, which is extracted from those camera images. Tairua beach is characterized by sand with a D50 of 0.3 mm. The beach is subjected to easterly and northeasterly swell and storm waves [
35]. The offshore wave climate has a mean
Hs of 1.4 m, and can reach values of up to 6 m during storm events [
43]. In the winter (southern hemisphere) of 2000 a series of huge storms occurred, which caused erosion of the shoreline of roughly 20 m [
44].
4. Results
In this section, calibration (
Section 4.1) and validation (
Section 4.2) results are presented, when SF-ST and the multi-timescale model (SF-MT) are applied to all three datasets. An overview of model results assessed by four different model skill indicators (correlation, NMSE, BSS and AIC), is presented in
Section 4.2 as well.
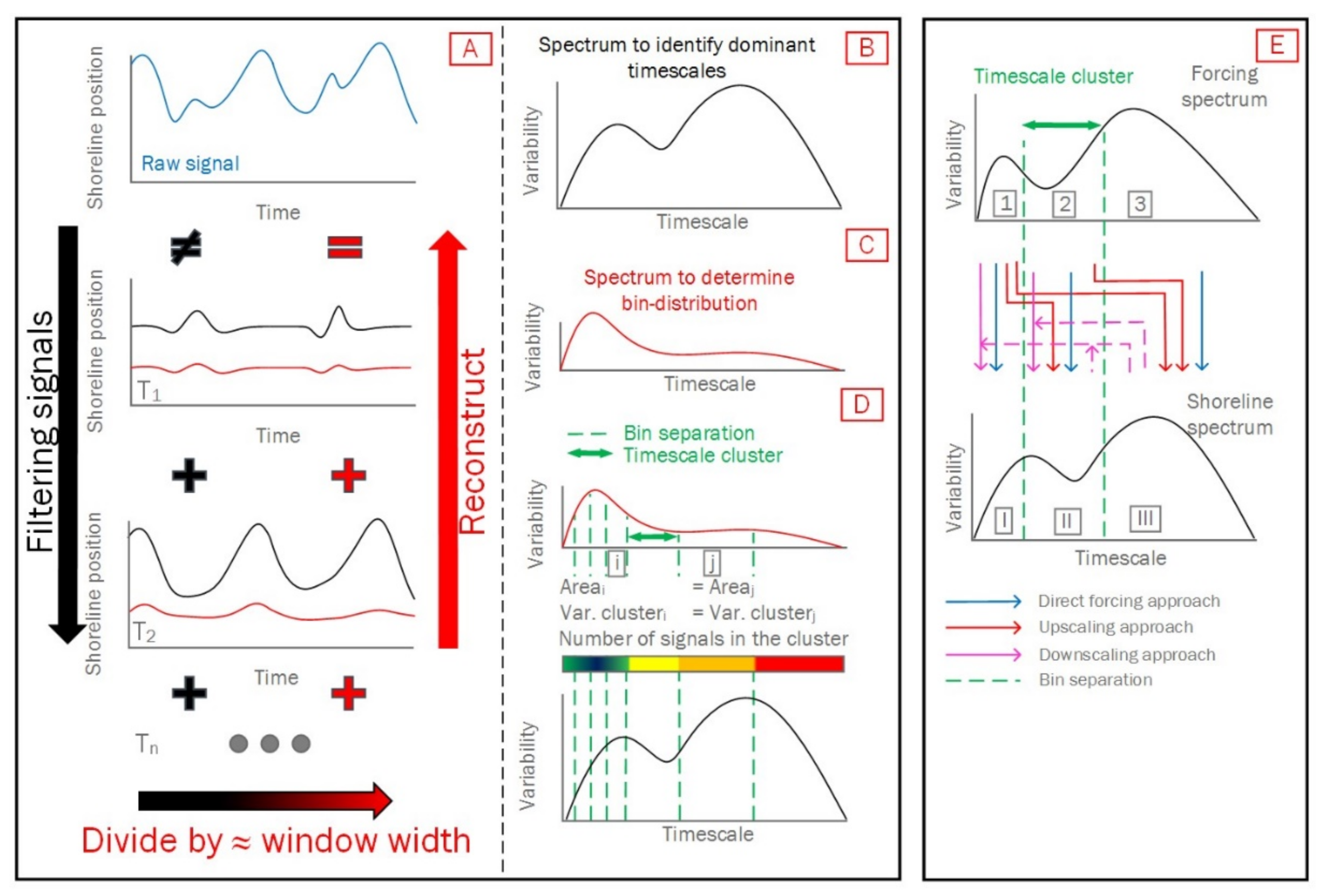
Table 2 provides information regarding the three datasets at the model training sites used in this study: Narrabeen, Nha Trang and Tairua. The number of timescale bins is presented, which represents the number of timescale clusters used in the multi-timescale implementation. Or stated otherwise, in how many bins the temporal spectra are divided. The most striking difference between the datasets is the number of dominant timescales in the shoreline position and wave forcing data (i.e., local maximums in the temporal spectra,
Section 3.1 and
Figure A1).
At Narrabeen, only one dominant timescale is found in the shoreline position signal that is related to the seasonal variation (i.e., 322 days,
Table 2). Besides the seasonal variation, the storm/swell timescale is dominant in the wave forcing data (i.e., 2–14 days). At Nha Trang, two dominant timescales are present in the wave forcing: the monsoon and seasonal timescale, which implies that typhoons are not dominant. In the shoreline position signal, only the seasonal variation is dominant. At Tairua, a monthly and seasonal to inter-annual timescale is dominant in the shoreline position signal, while storms/swells dominate the wave climate. The dominant timescales in the wave conditions observed during the research period correspond well with the literature mentioned in
Section 2 and are thus considered representative for each of the study sites.
4.1. Calibration
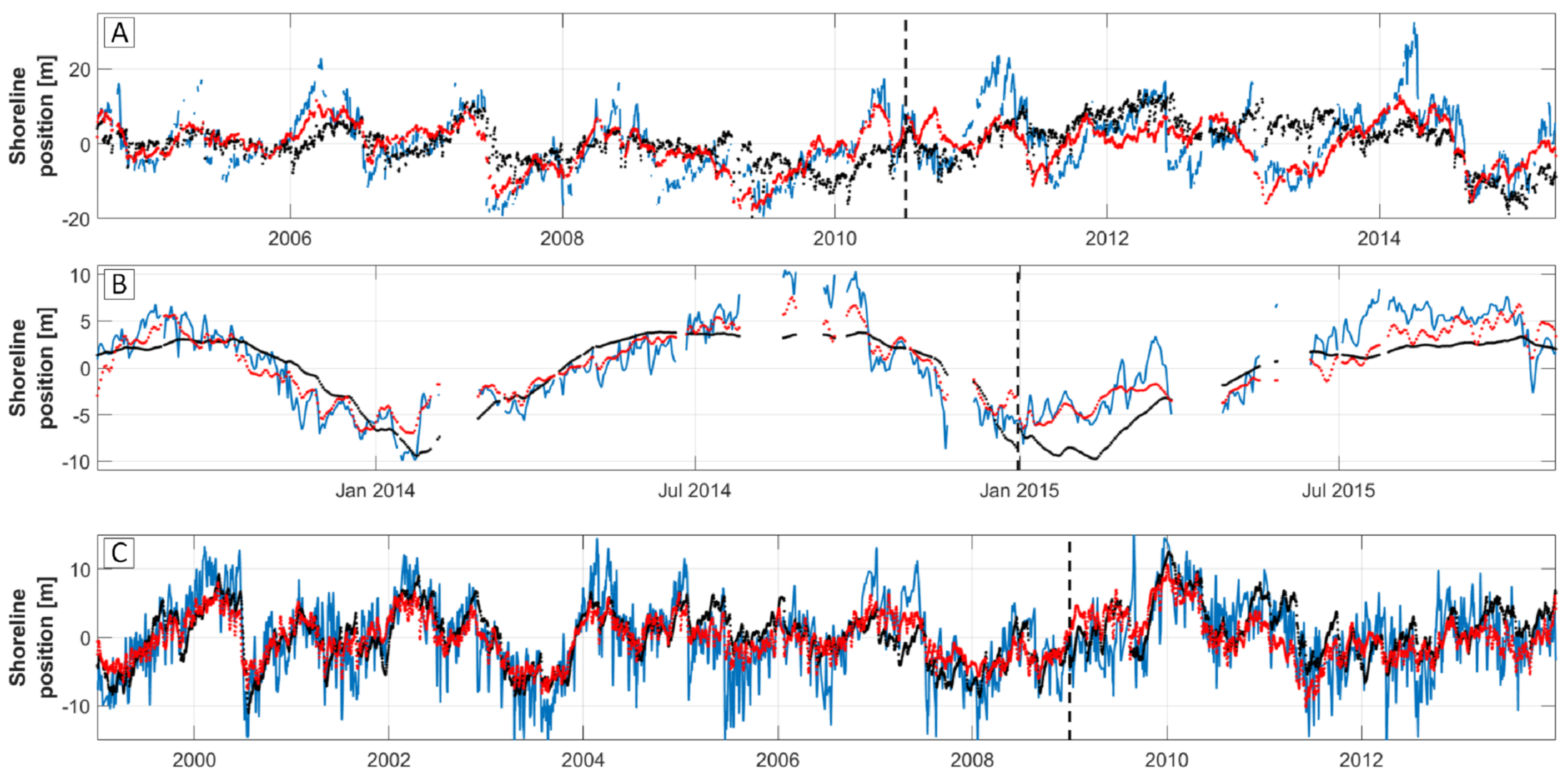
Figure 5 presents the results (calibration and validation) when SF-ST (black) and SF-MT (red) are applied to the datasets at Narrabeen (
Figure 5A), Nha Trang (
Figure 5B) and Tairua (
Figure 5C). The transition between the calibration and validation time periods is indicated with a dashed black line.
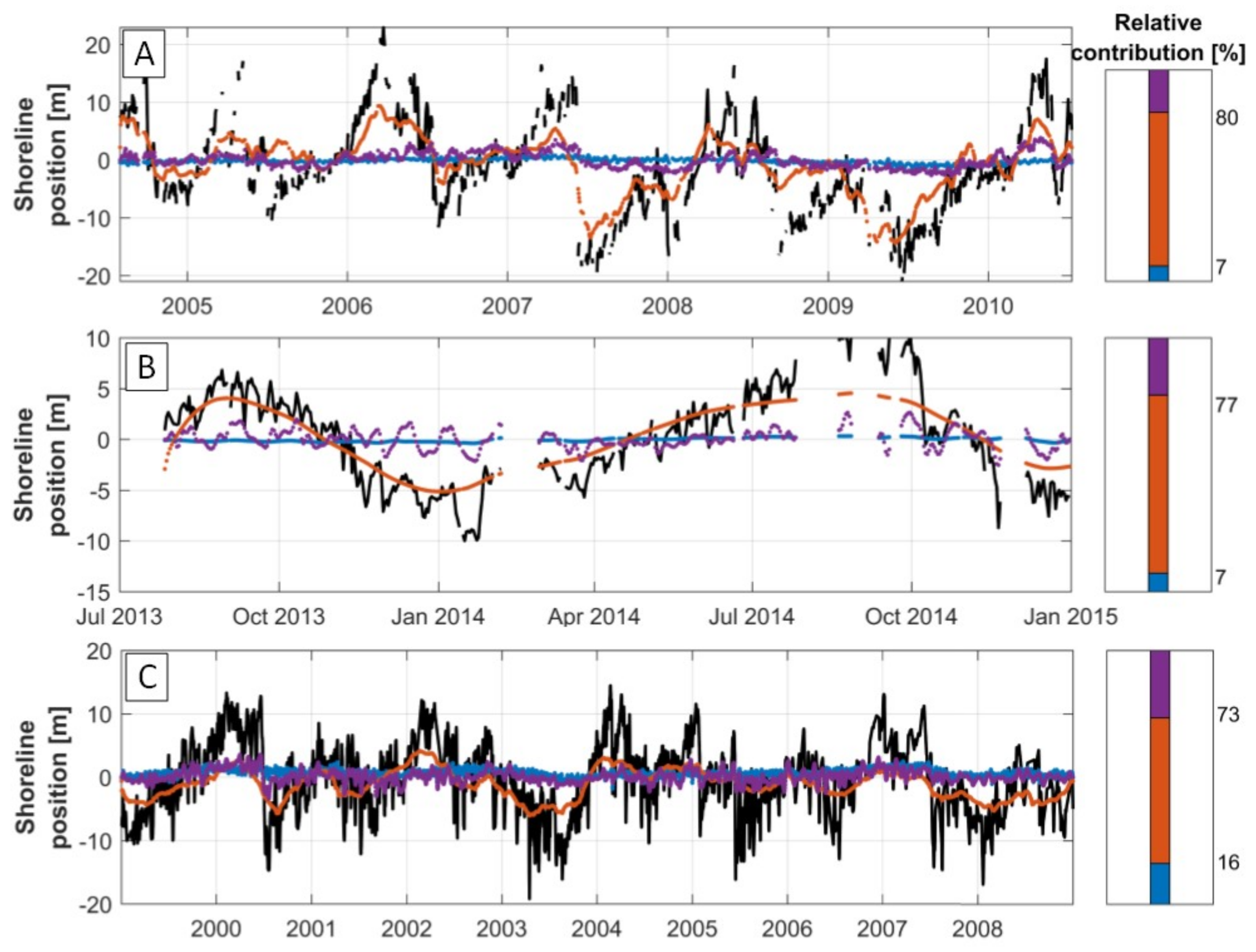
Figure 6 presents the contribution of each model improvement step over time (left, in similar order) and the corresponding relative contribution of each model improvement step (right) for the calibration period only. The blue, orange and purple lines correspond to the direct forcing, upscaling and downscaling approaches, respectively. In
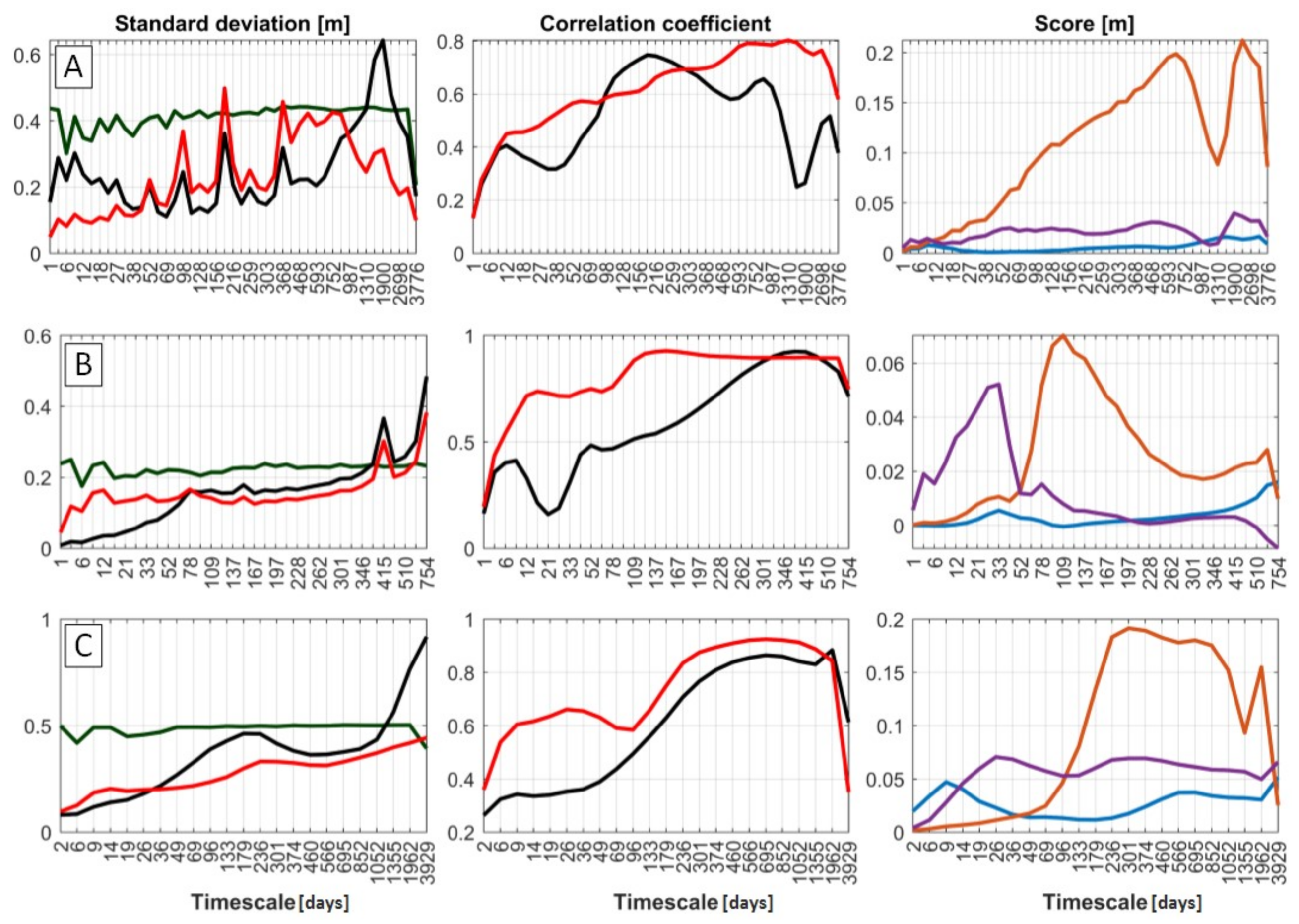
Figure 7 the standard deviation per timescale cluster is shown (left panels) for the shoreline position data (green), the SF-ST (black) and SF-MT (red) model result (calibration + validation) for all datasets (in similar order as
Figure 5 and
Figure 6). Note that, to show the standard deviation per timescale cluster for SF-ST, the filter function is applied to the SF-ST model result. In the middle panel, the correlation between the SF-MT model result (and SF-ST) and the shoreline position data is presented on all different timescales. In the right panels, a model score is given for each of the three model improvement steps for all different timescales. The score for every timescale consists of the correlation coefficient (model result—data on that particular timescale) multiplied by standard deviation of that modelled signal, timescale and model improvement step. Using this modelling result score means that (1) if the correlation between the data model is high, the model is able to reproduce shoreline change at this timescale, (2) if the standard deviation of the model result is high, that particular shoreline signal is important in determining shoreline change according to Equation (4).
For the Narrabeen dataset (
Figure 5A) SF-ST (black) is able to capture the smaller timescale storm/swell response (order of days), but the larger timescale shoreline variations are captured to a lesser extent (
φ = 3 days and
c = 1.96 × 10
−7 (m/s)/(W/m)
0.5). The SF-MT model (red) also captures the storm timescale to a certain extent, but yields a considerable increase in skill (BSS of 0.61 or an ‘excellent’ rating) by better capturing shoreline change on larger timescales (larger than the storm timescale). This occurs, for example, in 2009, where first the large erosion period halfway through 2009 is captured well by the SF-MT model and poorly by SF-ST, while the same occurs for the accretive period during the second half of 2009. Regarding the energetic storm sequence in June 2007 (see
Section 2), neither model is capable of capturing the rapid shoreline recession. Overall, the SF-MT model yields a better fit to the data, compared to SF-ST, which seems to underestimate the amplitude of shoreline accretion/erosion most of the time. This is emphasized by the NMS error between the data and model result, which is 0.71 for SF-ST and reduces to 0.29 for the SF-MT model. This corresponds to a ‘fair’ and ‘excellent’ rating for SF-ST and SF-MT, respectively. The correlation coefficient is substantially larger for SF-MT as well (63%). The standard deviation and correlation plot per timescale (
Figure 7A) shows that for storm/swell timescales (1–12 days) SF-ST has a higher standard deviation and a similar correlation. Hence, the smaller storm timescales are better captured by the SF-ST model. However, for SF-MT the standard deviation multiplied with the correlation is higher for timescales larger than 33 days (up to 2285 days). Hence, the dominant seasonal timescale is better captured by the SF-MT model, which contributes most to the model improvement. Moreover, the upscaling approach contributes considerably (73%) to the total shoreline signal (orange line in
Figure 6A). The larger timescales are captured by the upscaling and downscaling (purple,
Figure 7A) approaches whereas the smaller (storm/swell) timescales are captured by the downscaling approach as well. The direct forcing approach (blue) has a limited contribution to the total model result (7%,
Figure 6A), compared to the upscaling (73%) and downscaling (20%) approach. The ∆AIC score (difference in AIC score between SF-ST and SF-MT) is larger than 1, which indicates that a considerable model improvement is acquired during the calibration phase.
At Nha Trang considerable improvement is made by implementing multiple timescales within the SF-ST model (
Figure 5B), which is emphasized by a BSS of 0.62 (i.e., an ‘excellent’ rating). Where SF-ST (
φ = 180 days and
c = 4.61 × 10
−8 (m/s)/(W/m)
0.5) only partially captures the seasonal timescale (the most dominant timescale, see
Table 2 and
Figure A1), the SF-MT model captures both the response to monsoons and the seasonal variation in wave data (i.e., the two dominant timescales in the wave data). The response to the energetic typhoon in November 2013 is not captured by SF-ST nor SF-MT. The NMS errors for SF-ST and SF-MT with the data is 0.31 (‘good’) and 0.13 (‘excellent’), respectively.
Figure 7B shows that the standard deviation and correlation per timescale for SF-MT (red) are high and relatively uniformly distributed across the different timescales. This states that all timescales are well captured (except for the typhoons with a daily timescale). For SF-ST (black) the correlation is lower for all timescales except for the seasonal variation, where the correlation is similar. The standard deviation is lower/higher for timescales smaller/larger than 78 days. If both indicators are combined, it becomes clear that the largest contributor to the model improvement of SF-MT are the smaller timescales (i.e., the monsoons). Furthermore, note that an improvement is already made by using the upscaling approach only (orange line
Figure 6B). However, in that case, only the response to the seasonal variation is captured. The response to monsoons (timescale of ≈ 20 days) is captured by the downscaling approach (purple). The relative contribution of each model improvement step indicates as well that the seasonal timescale (upscaling) is the most dominant (70%) in determining coastline evolution, followed by the monsoon response (downscaling, 23%).
Figure 7B implies as well that the downscaling approach captures the smaller timescales (monsoons), while the larger timescales (seasonal variation) are captured by the upscaling approach. The ∆AIC score is larger than 1, which implicates that the larger number of calibration parameters in the SF-MT model is justified by a considerably better model fit (relative to SF-ST).
From
Figure 5C it becomes clear that the SF-ST (black,
φ = 150 days and
c = 1.03 × 10
−7 (m/s)/(W/m)
0.5) and SF-MT (red) model both capture shoreline change well for the dataset at Tairua and at first sight model differences are less pronounced than for the dataset at Narrabeen and Nha Trang. The NMS error indicates that there are differences: 0.51 for SF-ST and 0.36 for SF-MT. However, they both correspond to a ‘good’ rating, although the error is considerably lower for SF-MT. This difference is also emphasized by the BSS of 0.3, indicating that SF-MT is a ‘good’ improvement compared to SF-ST. The better model capability of SF-MT to capture shoreline change is emphasized as well in
Figure 7C: both the standard deviation and the correlation for storm to monthly dominant timescales are higher for SF-MT. Those figures show as well that for the dominant seasonal to inter-annual timescales shoreline change is captured well by both models. However, there are certain moments in time where the SF-MT model outperforms SF-ST. This occurs, for example, at the end of 2006/beginning of 2007, where the accretion period is not well captured by SF-ST (
Figure 5C). The rapid response to the series of huge storms that occurred in the winter of 2000 is captured reasonably by both models. From
Figure 6C and
Figure 7C becomes clear that the larger dominant seasonal to inter-annual timescales are modelled using the upscaling approach (orange, 57%), the smaller timescales are modelled using the downscaling (monthly timescale, purple, 27%) and direct forcing approach (storm/swell timescale, blue, 16%). Moreover, the ∆AIC score is larger than 1, which indicates that a considerable model improvement is acquired. Note that the correlation coefficient is higher for SF-MT as well (0.85 compared to 0.70 for SF-ST).
4.2. Validation
During model validation, wave data in combination with the calibrated free parameters found in
Section 4.1 are used to predict shoreline evolution. However, measured shoreline data is still available and is used to compare with the shoreline predictions.
For the validation phase, shoreline predictions are shown in
Figure 5 as well.
The validation results at Narrabeen reveal that the result of SF-MT outperforms that of SF-ST, but differences are less pronounced as for the calibration phase (BSS of 0.26 or a ‘good’ rating, compared to 0.61 or an ‘excellent’ rating for the calibration phase). From the timeseries in
Figure 5A, it becomes clear that especially after 2013, the prediction of SF-MT is closer to the data than the prediction of SF-ST. The NMS error between the data and model prediction is 0.83 for the SF-ST model, which reduces to 0.61 for the SF-MT model. This corresponds to a ‘poor’ and ‘fair’ rating, respectively. The overall variability of the beach is better represented by the SF-MT model, which is emphasized by the correlation coefficient (0.45 compared to 0.62, for SF-ST and SF-MT, respectively). The ∆AIC score is smaller than 1. This indicates that SF-ST is preferred according to this score, due to the trade-off between the model’s simplicity and goodness of fit. The ∆AIC score indicates that for the SF-MT model the number of calibration parameters (i.e., decreased model simplicity), which is penalized for by the AIC score (Equation (A7)), is too large compared to the goodness of fit (relative to SF-ST).
The model validation phase at Nha Trang shows similar characteristics as for the calibration phase as the seasonal variation and the response to summer and winter monsoons are well predicted by SF-MT, while the SF-ST model only partially captures the seasonal variation (
Figure 5B). The NMS error for SF-ST and the SF-MT model is 0.63 and 0.26, which corresponds to a ‘fair’ and ‘excellent’ rating, respectively. The similar characteristics for the calibration and validation phase are also emphasized by the BSS, which is 0.61 for the validation phase while it was 0.62 for the calibration phase (i.e., an ‘excellent’ rating). The ∆AIC score is smaller than 1, which indicates that the SF-ST model is preferred due to the model’s simplicity compared to the relative goodness of fit.
A comparison of the validation results for both models at Tairua (
Figure 5C) shows that some improvement is made by implementing multiple timescales in SF-ST, especially during the last 2 to 3 years of the dataset (BSS of 0.18 or a ‘fair’ model improvement). Overall, the SF-MT model predicts shoreline change better than SF-ST, which results in a decrease in the NMS error of 18% and an increase in the correlation coefficient of 8% (
Table 3). The rating of the NMS error for SF-ST and SF-MT is ‘fair’ and ‘good’, respectively. The ∆AIC score is smaller than 1, which indicates that the SF-ST model is preferred due to the model’s simplicity compared to the relative goodness of fit.
5. Discussion
This work was motivated by the fact that single memory decay models fail to reproduce shoreline evolution at sites where multiple forcing timescales are present, such as seasonal and monsoon forcing. In this paper, we focused on a single memory decay hybrid model that predicts temporal changes of the shoreline location due to varying wave conditions. Although there are hybrid models that account for shoreline change due to, for example, cross-shore processes, longshore processes, sea level rise and include the beach-dune system [
21,
46,
47,
48], here the focus was on shoreline changes due to cross-shore and wave induced processes only. The hybrid model used here as a base is the ShoreFor model (SF-ST; Shoreline Forecast—Single Timescale—see description in
Appendix A), by [
17]. This model uses a holistic understanding of how a beach responds to several high-intensity forcing event characteristics (duration, intensity, clustering and recovery, see
Section 1), but model skill deteriorates considerably if multiple dominant forcing and beach response timescales are present. The Shoreline Forecast Multiple Timescales (SF-MT) model basically uses the same holistic understanding as SF-ST of how a beach responds to wave forcing. However, it is not optimized once for the raw wave and shoreline position timeseries, but multiple times for each timescale separately (including upscaling and downscaling procedures). In [
49], an extensive research about the behavior and structure of the SF-ST model was performed, where it was shown and confirmed that within SF-ST the shoreline change is solely dependent on the past and present wave conditions, the SF-ST model mainly has one characteristic timescale and the model has a sort of implicit damping timescale introduced by
φ in Equation (A4). Hence, it is possible to create a model for multiple timescales, based on SF-ST, that represents a sum of individual components (i.e., timescale clusters) from several equilibrium shoreline models with different timescales.
In [
50], a different approach to model multiple timescales (from storm events to decadal time-scales) was developed (based on the Complete Ensemble Empirical Mode Decomposition method), and applied to the Narrabeen and Tairua dataset. Their approach first identifies and subsequently links the primary timescales in the large-scale sea level pressure and/or waves with identical timescales in the shoreline position (i.e., a direct forcing approach). Intriguingly, they found similar results as presented in this paper. For Narrabeen they found timescales of 181, 363 and 709 days to be important shoreline position timescales (besides the long-term trend). Other timescales of 17, 45, 85 and 1291 days were important as well, but showed less shoreline variability. Here,
Figure 7A shows a high standard deviation and correlation (and thus high shoreline variability) of the SF-MT shoreline prediction for timescales of approximately 52, 98, 184, 368, 528, 752 and 1900 days. For Tairua [
50] found timescales of 980, 146 and 352 days to be important shoreline variability timescales, and to a lesser extent timescales of 15, 39, 73, 1125, 1911 and 4537 days. The SF-MT model showed similar results here (although to a lesser extent compared to Narrabeen), where
Figure 7C shows that the important shoreline variability timescales (high correlation and standard deviation) are approximately all timescale clusters between 236 and 1962 days and 14 days. Hence, good agreement with results from a different multi-timescale model is achieved.
Apart from an increase in model prediction skill (
Table 3), compared to SF-ST, the SF-MT model also gains insight in how a beach responds to the considered wave forcing on multiple scales. The contribution of each model improvement step to shoreline evolution (
Figure 6 and
Figure 7) illustrates, for example, that at all sites’ extreme forcing events have a considerable and persistent shoreline impact (i.e., upscaling approach). It showed that these forcing events are responsible for 57 to 73% of the variability of shoreline evolution. Moreover, at all study sites long-term shoreline trends affect short-term forcing event impacts (i.e., downscaling approach). These affected short-term forcing event impacts are responsible for 20 to 27% of the variability of shoreline evolution. Moreover, the distribution of shoreline variability over the different modelling approaches and timescale clusters in SF-MT (last column in
Figure 7), showed that the upscaling approach is responsible for capturing shoreline change on the largest timescales in the dataset, which is logical, as this approach is modelling the persistent effect of short high-intensity wave forcing events on larger shoreline response timescales. Conversely, the modelled shorelines generated with the downscaling approach correspond better to shoreline data on smaller timescales, which is logical as well, as this approach is modelling the effect of the larger timescales in shoreline variation on the efficiency with which smaller timescale wave forcing events induce cross-shore sediment transport. The direct forcing approach does not account for particular shoreline response timescales as it seems to be dataset dependent.
Besides the literature mentioned in
Section 2, the temporal spectra (
Section 3.1 and
Figure A1) reveal the presence of multiple dominant timescales. These spectra can be considered before model application and can be used to determine if the SF-MT model is more favorable to use with respect to SF-ST (considering model complexity): multiple dominant forcing timescales lead to a substantial improvement (e.g., Narrabeen and Nha Trang, BSS of 0.61 and 0.62, respectively), while if a single timescale is present, a less substantial improvement can be expected (Tairua, BSS of 0.30). For all study sites, the ∆AIC score is larger than 1 for the calibration phase, indicating a considerable model improvement is acquired when accounting for model skill and complexity. However, for the validation phase the ∆AIC score is smaller than 1. In the case of a low/negative ∆AIC score and a limited number of observed dominant timescales, a reduced number of bins can also be tested to increase the ∆AIC score. Nevertheless, SF-MT currently handles a large number of ‘blind’ bins by giving low/no weight to timescale clusters where low variability is observed to have an unbiased result regarding timescale interactions (rather than hardwire on dominant timescales before model application). The multi-timescale model outperforms SF-ST at sites where short-term (2–3 years) and long-term (10–14 years) data is available. Interestingly, for longer period simulations, climate variability induces changes in wave regimes at all scales, storminess of storm tracks in mid-latitudes, tropical cyclones, but also monsoons and seasonal to inter-annual average conditions [
21,
51]. Moreover, as a variable climate is expected, multiple timescales of shoreline adjustment to forcing likely exist almost everywhere. In that context, the humble simplified approach developed in SF-MT can be an attractive way to capture shoreline change to climate modes, climate change and their timescale-interactions.
Although the SF-MT model outperforms SF-ST at three hydrodynamic and morphologically dissimilar sites, it is far from a perfect shoreline prediction model as it still does not capture a large part of the observed shoreline variability, which can have several reasons:
Although camera-derived shorelines give a shoreline proxy, instantaneous and/or time averaged imagery is going to be affected by the role of tidal fluctuations, sea level anomalies and wave run-up. Moreover, sediments can be built up as a berm above the mean high water line and may not show up at all when using a single contour for the shoreline location. All those mechanisms/effects can have an influence on the shoreline location and are not accounted for in the model.
Due to the linear interpolation of the shoreline location (for Nha Trang) and wave forcing parameters (i.e.,
Hs and
Tp) for all study sites to a single value uniformly spaced every 24 h apart, information is lost, which could induce errors when predicting shoreline change (e.g., storm and tidal aliasing effects). This data handling has a larger effect on the storm timescales compared to seasonal and inter-annual timescales (which were generally captured well by the model).
Figure 7 shows that sub-weekly timescales are captured to a lesser extent compared to larger timescales (small standard deviation and correlation). Moreover, at these smaller timescales detailed morphodynamics can become critical for beach response, but they are not incorporated in SF-MT, and besides that, the equilibrium concept is at its limit for those small timescales. All these effects can be the cause for the relatively bad prediction skill for sub-weekly timescales. This is emphasized by the fact that the rapid response to the energetic (series of) storms, highlighted in
Section 2, was not captured well by both models at Narrabeen and Nha Trang (and fairly reasonable at Tairua).
A second-order polynomial was used to detrend the raw shoreline position timeseries to remove timescales which are larger than the length of the dataset. However, it is possible that there is a relation between this second-order polynomial trend and how the beach responds to incoming wave forcing. For example, a strong erosive trend throughout the timeframe of the dataset would mean that the impact of monsoons become less as time progresses. This phenomenon is not implemented in SF-MT.
As all study sites comprise embayed beaches, it is possible that longshore effects play a role due to, for example, long-term rotation of the beach, whereas the current model only accounts for cross-shore processes. At Narrabeen and Nha Trang, this mechanism is minimized to a certain extent as the shoreline location was determined by longshore averaging a certain stretch of the beach which is close to the center of rotation. Moreover, there could be an effect on the shoreline location of the angle of wave incidence (or sea level pressure variations as was shown by [
50]) as it may also vary on different timescales. Those phenomena are not implemented in the model.
Timescale Interactions
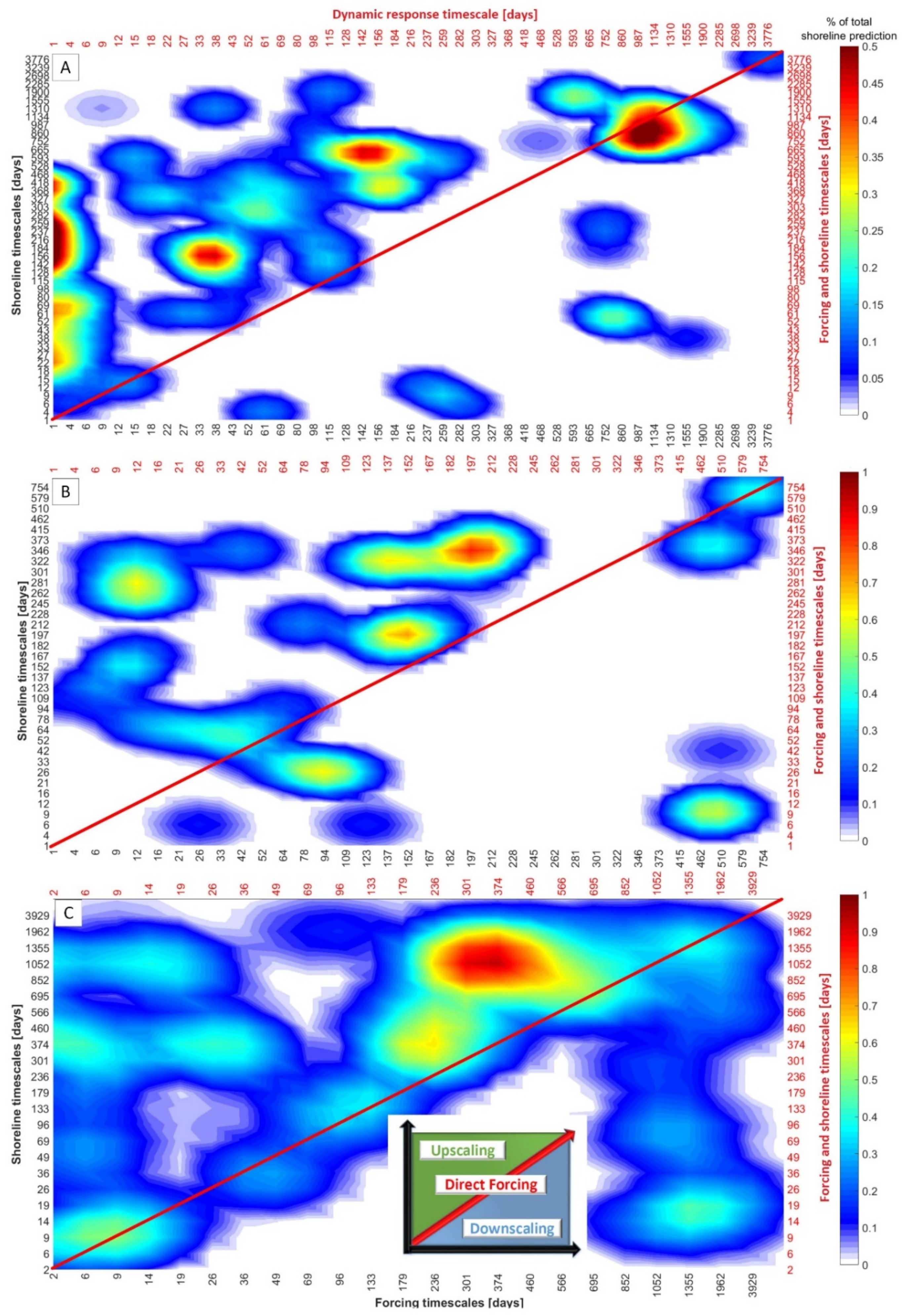
The SF-MT model generates multiple individual signals, in which each signal (i.e., timescale cluster) has a unique timescale relation between the wave forcing and shoreline signal. A certain selection of all these generated signals make up the total shoreline signal (
Section 3.3, Equation (4)). To visualize these unique timescale relations of all chosen modelled signals, a grid of timescale interactions is presented (
Figure 8). In those grids, the percentage to the total shoreline signal per individual modelled signal (i.e., timescale cluster) is plotted, revealing the most important timescale interactions per dataset. The axes can be used to check which timescales are considered and the diagonal, upper left corner and lower right corner correspond to signals generated with the direct forcing, upscaling, and downscaling approach, respectively.
Figure 8 presents the timescale interactions at Narrabeen (
Figure 8A), Nha Trang (
Figure 8B) and Tairua (
Figure 8C).
The interactions between timescales shown in
Figure 8A show that at Narrabeen the short-term high-intensity forcing events with a timescale of approximately 1 to 6 days have a large and persistent impact on the large timescale shoreline variation (quasi-seasonal). Moreover, shoreline variability on inter-annual timescales is driven by variations in the wave climate with a similar timescale, but it is sensitive to whether the coastline is eroded or accreted on a mildly larger timescale of approximately 860–1134 days (i.e., downscaling approach). This means that the impact to inter-annual forcing events is dependent on whether that coastline is eroded or accreted on a similar to larger timescale.
In contrast,
Figure 8B shows that at Nha Trang small(er) timescales in the wave forcing (especially those with a timescale of 123–197 days) have a persistent and considerable effect on coastline evolution, and which is together with the persistent effect of monsoons the cause of the seasonal variability (i.e., upscaling). Furthermore, as indicated by the timeseries in
Figure 6B, shoreline response to both summer and winter monsoons is affected by longer-term shoreline variations (i.e., downscaling). This means that the response to these monsoons is not equal throughout the year. Beach response to monsoons (with a timescale of approximately 10–30 days) is larger when the shoreline is already accreted on a larger timescale (3 months or 1.5 year, see
Figure 8B). This supports the fact that due to an overall accreted beach state, the sand supply from within the surf zone is close to the shoreline, which yields a high sediment transport efficiency and faster response to monsoons. Conversely, when the coastline is already eroded on a larger timescale, the monsoon response is relatively smaller: a large spatial separation between the shoreline and the more offshore sediment source yields an inefficient transfer of sediment between the more offshore region and beach face, causing a lower response rate.
Figure 8C visualizes the timescale interactions at Tairua. It shows that the wave forcing with an annual timescale has a large and persistent impact on the inter-annual shoreline response (852–1355 days). Moreover, shoreline response on the smallest (storm/swell) timescales (6–9 days) is driven by wave forcing events on a similar timescale (i.e., direct forcing). Furthermore, the inter-annual shoreline change (i.e., timescales of 1052 to 1355 days) has an influence on how the beach responds to the short timescale wave forcing events with a timescale of approximately 9 to 19 days (i.e., downscaling).
6. Conclusions
In this study, a new approach is presented to allow for multiple wave forcing and beach response timescales within the single-timescale equilibrium shoreline prediction model ShoreFor (SF-ST; Shoreline Forecast—Single Timescale). While SF-ST was only capable of accurately predicting shoreline change on the single most dominant beach response timescale, multiple dominant timescales can determine shoreline evolution. The multi-timescale implementation (SF-MT; Shoreline Forecast—Multiple Timescales) is governed by filtering and identifying all of the wave forcing and shoreline response timescales. Subsequently, timescales in the wave forcing and shoreline signals are linked through a direct forcing term (as used in SF-ST) and two additional terms: a time-upscaling and a time-downscaling term. In the direct forcing term, the shoreline is forced by waves on the corresponding timescales (e.g., a beach erodes and recovers to an individual storm). The upscaling term accounts for the persistent effect of short(er) forcing timescales on longer shoreline response timescales (e.g., seasonal persistence of summer and winter monsoons). This is modelled using the envelope of the filtered wave signals, which provides the timescale link. The downscaling approach governs the effect of long(er) timescales of shoreline evolution on shoreline response to short(er) wave forcing timescales (e.g., storm impact during accreting or eroding trends). This effect is modelled by introducing a time-dependent response factor from a filtered longer timescale shoreline evolution signal. The multi-timescale model showed improvement compared to SF-ST at the three sandy, microtidal, but hydrodynamic and morphologically contrasted sites used in this study: the normalized mean square error was improved during validation by 27, 59 and 18% for Narrabeen, Nha Trang and Tairua, respectively. In the case of multiple dominant forcing timescales, a substantial improvement is achieved (i.e., Narrabeen and Nha Trang), otherwise improvement is less substantial (i.e., Tairua). For all sites, we found that extreme forcing events have a considerable and persistent shoreline impact (i.e., upscaling term, responsible for 57 to 73% of the variability of shoreline evolution). This effect was the most pronounced at Narrabeen, where short-term high-intensity forcing events with a timescale of approximately 1 to 6 days have a large and persistent impact on the quasi-seasonal shoreline evolution. Moreover, at all study sites long-term shoreline trends affect short-term forcing event impacts (i.e., downscaling term, responsible for 20 to 27% of the variability of shoreline evolution). This effect was the most striking at Nha Trang, where we showed that shoreline response to both summer and winter monsoons is affected by longer-term shoreline variations: in the case of an overall accreted (eroded) beach state, the sand supply from within the surf zone is close to (far from) the shoreline, which yields a high (low) sediment transport efficiency and faster (slower) response to monsoons. Dealing with multiple timescales and their interactions, this combined approach leads to several interests when considering interplay between climate modes and storminess under climate change when forecasting future shoreline evolution.


 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}