A Printable Device for Measuring Clarity and Colour in Lake and Nearshore Waters

 ,
,  , and
, and
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Mini-Secchi Disk Development
2.2. The Mini-Secchi Disk
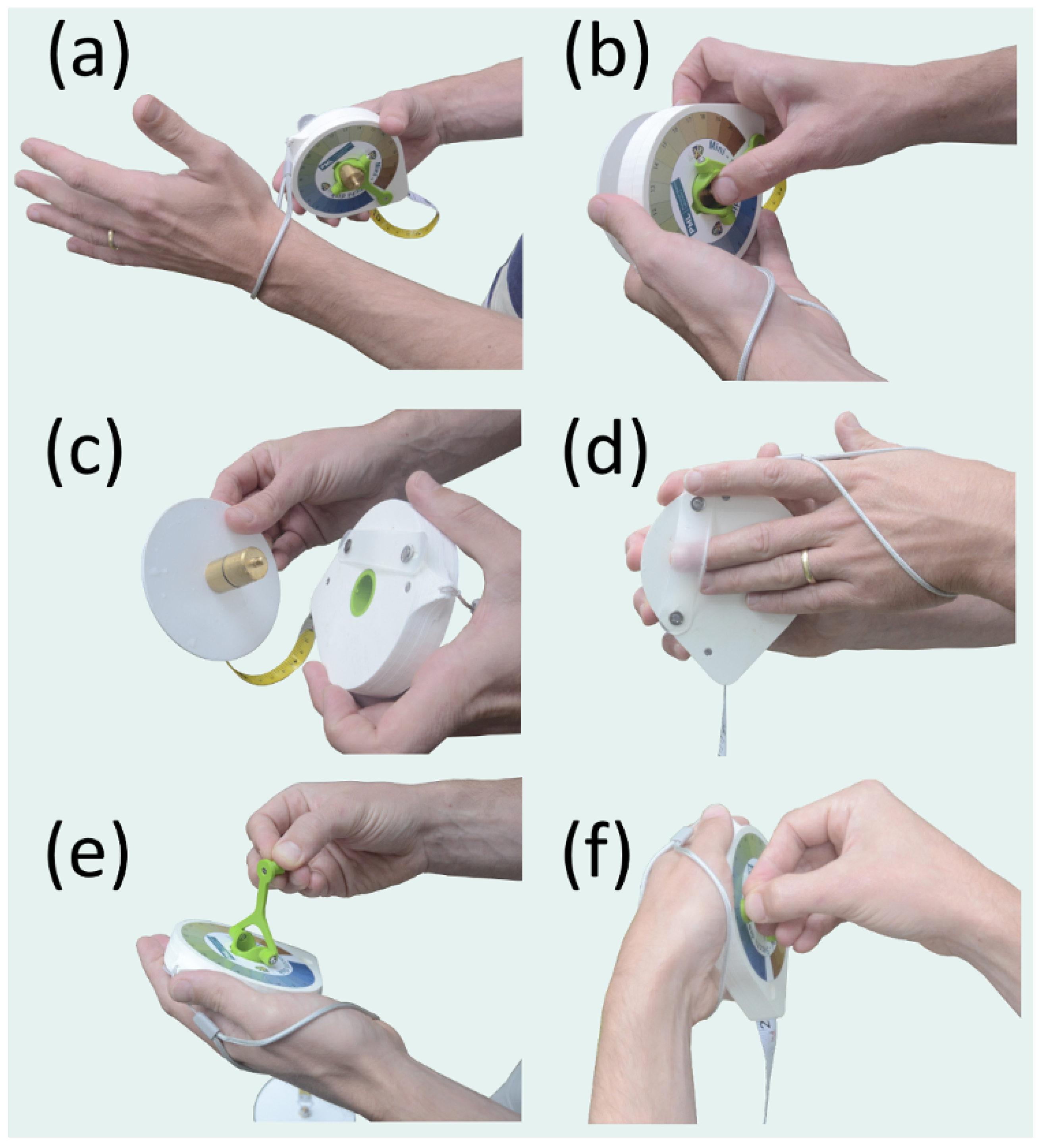
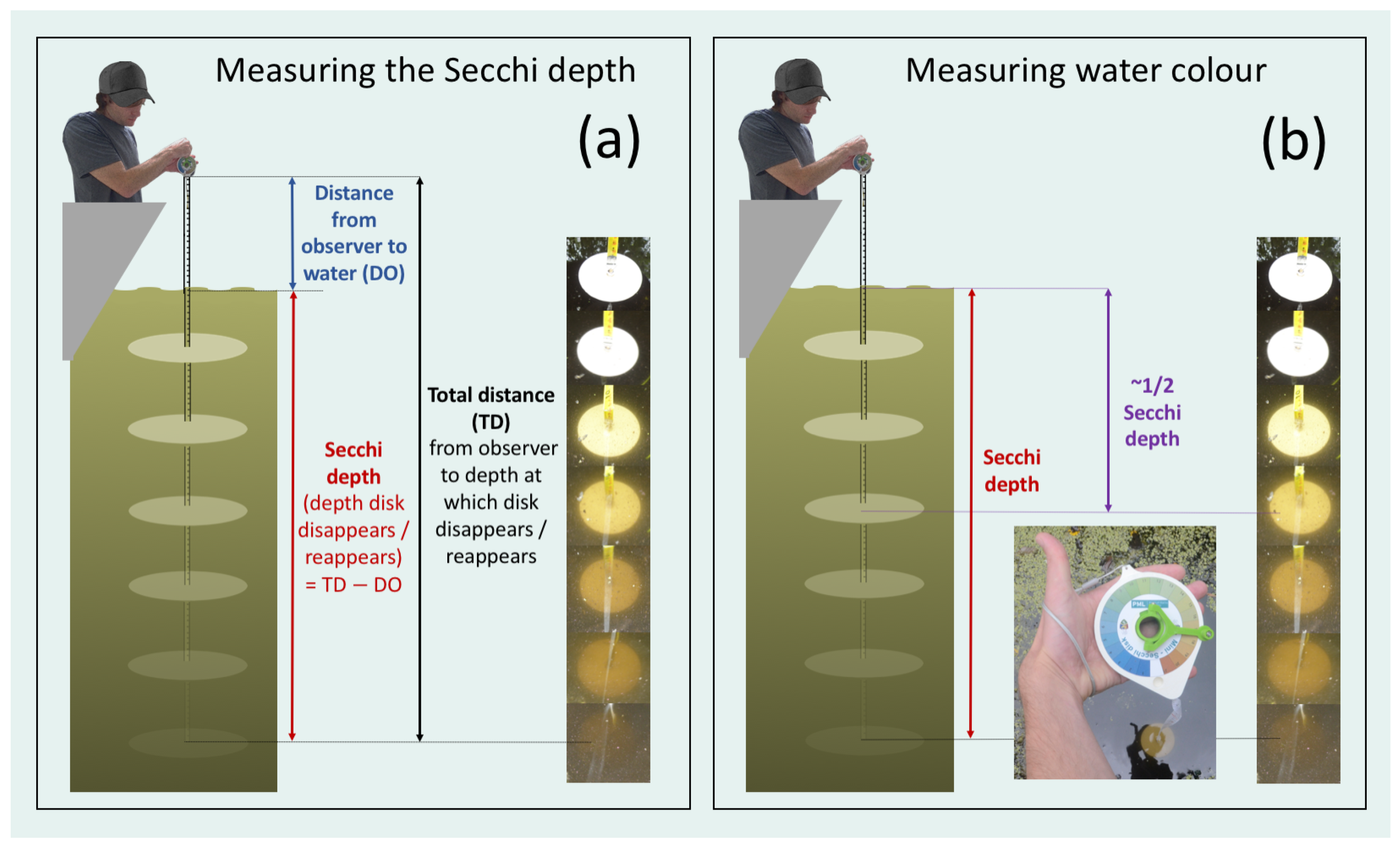
2.3. Operating the Device
2.4. Testing Applications of the Mini-Secchi Disk
3. Results and Discussion
3.1. Mini-Secchi Disk Applications
3.1.1. Capturing Spatial Variations in Lake Clarity and Colour
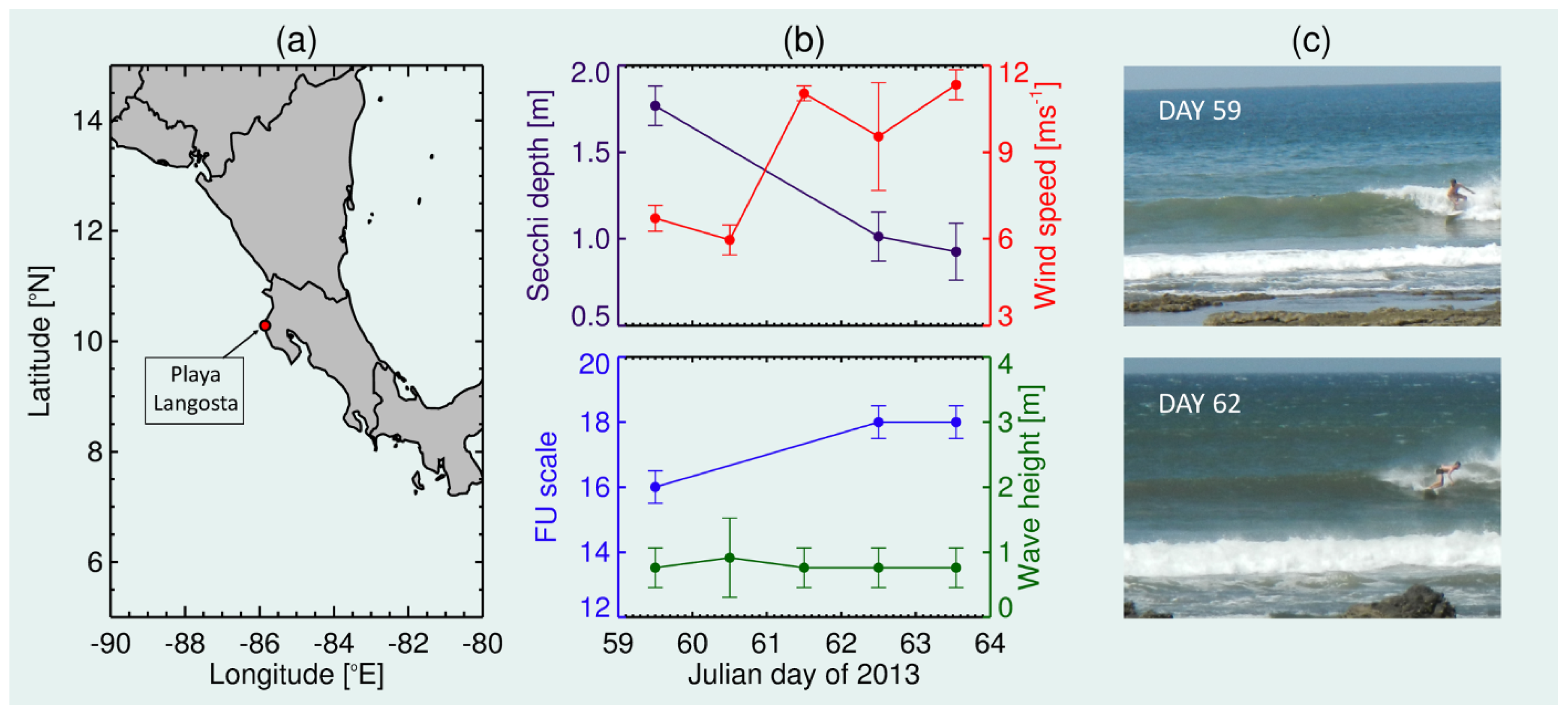
3.1.2. Recreational Water User Deployment in the Nearshore
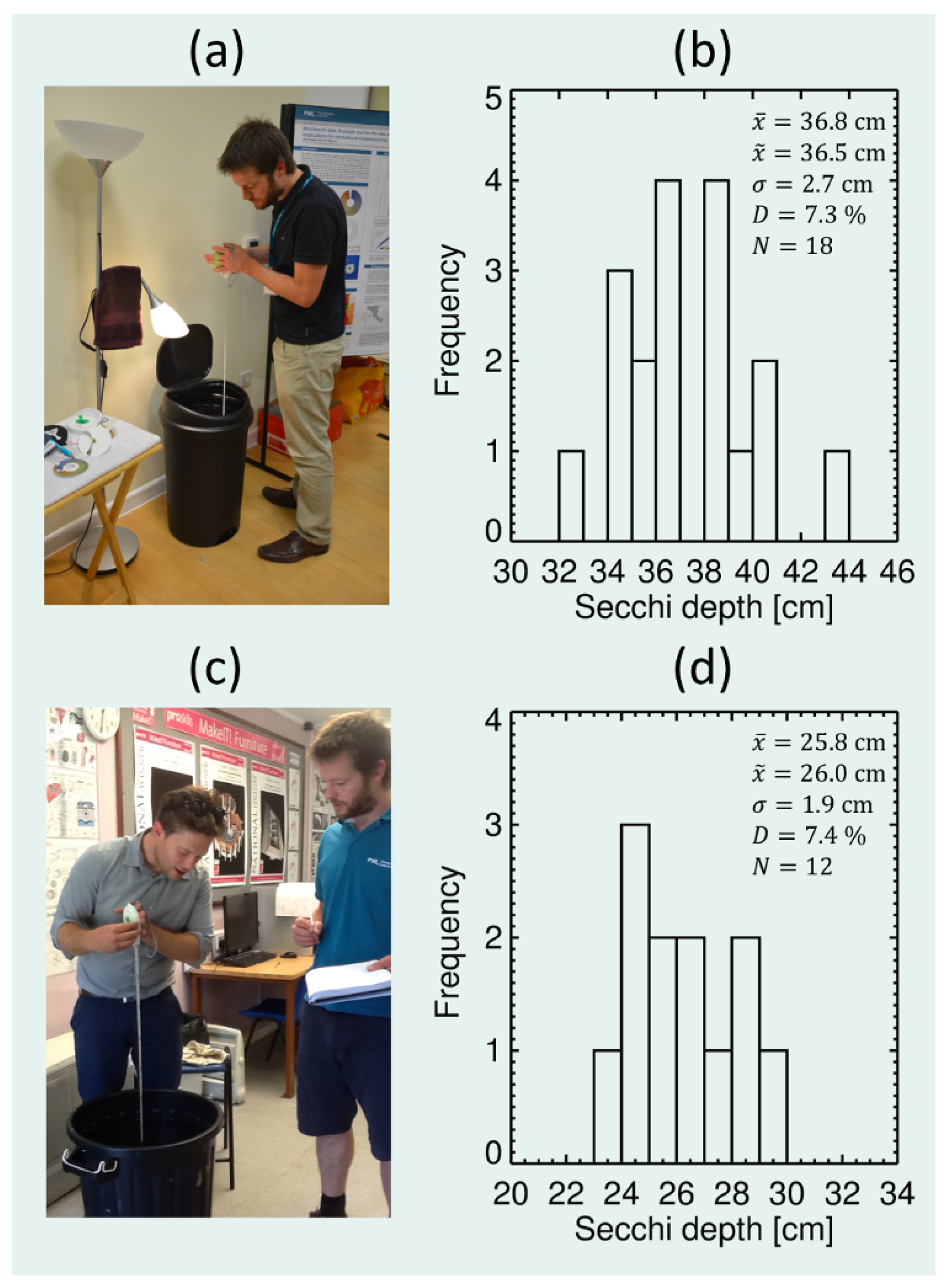
3.1.3. A Tool for Teaching Aquatic Optics
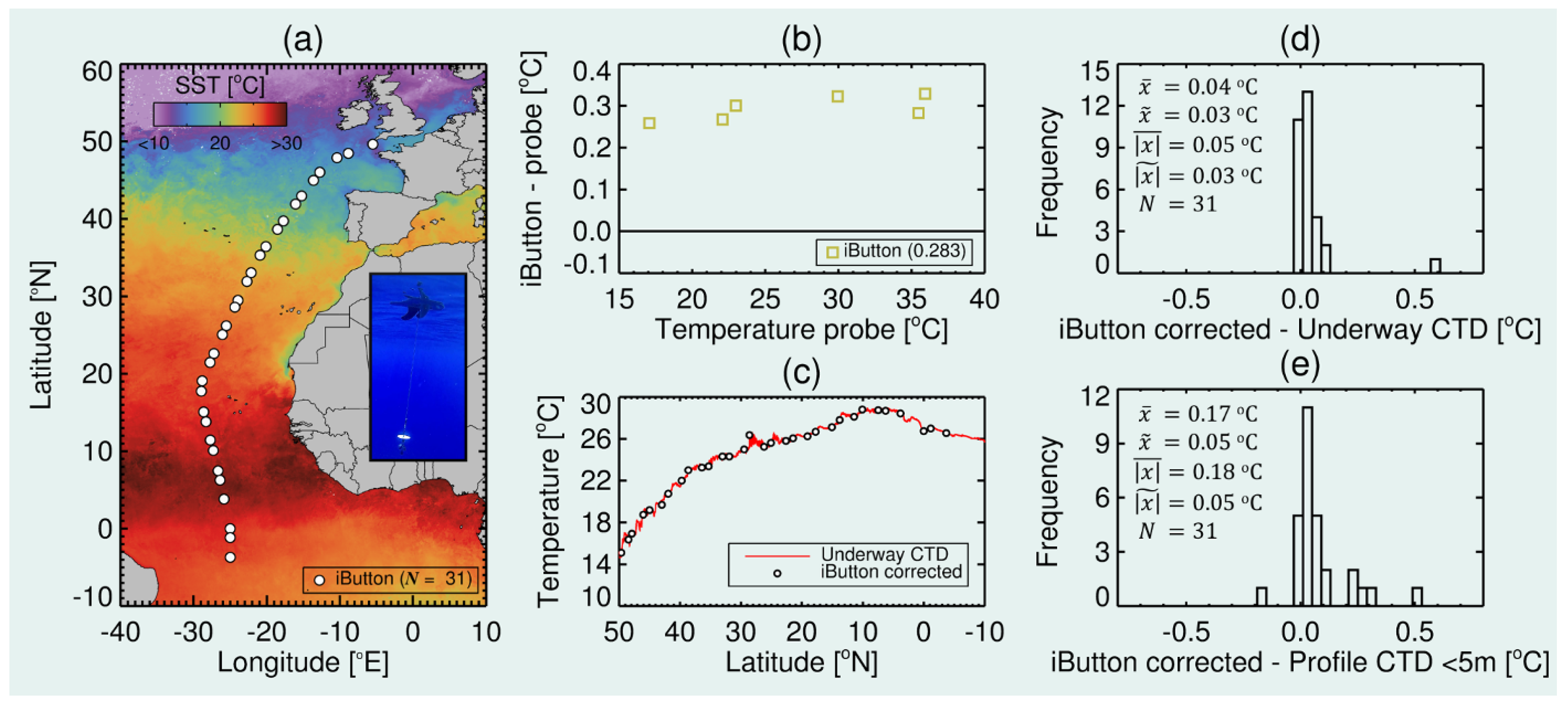
3.1.4. Temperature Measurements from the Mini-Secchi Disk
3.2. Future Directions for the Mini-Secchi Disk
4. Summary
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Secchi, P.A. Relazione delle esperienze fatte a bordo della pontificia pirocorvetta Imacolata Concezione per determinare la trasparenza del mare. In Il Nuovo Cimento Giornale de Fisica, Chimica e Storia Naturale; Springer: Berlin, Germany, 1985; Volume 20, pp. 205–237. [Google Scholar]
- Forel, F.A. Une nouvelle forme de la gamme de couleur pour l’étude de l’eau des lacs. Archives des Sciences Physiques et Naturelles/Société de Physique et d’Histoire Naturelle de Genève 1890, 6, 25. (In French) [Google Scholar]
- Ule, W. Die bestimmung der Wasserfarbe in den Seen. In Kleinere Mittheilungen. Dr. A. Petermanns Mittheilungen aus Justus Perthes geographischer Anstalt; Justus Perthes: Gotha, Germany, 1892; pp. 70–71. [Google Scholar]
- Wernand, M.R. On the history of the Secchi disc. J. Eur. Opt. Soc. Rapid Publ. 2010, 5, 10013s. [Google Scholar] [CrossRef]
- Wernand, M.R.; van der Woerd, H.J. Spectral analysis of the Forel-Ule ocean colour comparator scale. J. Eur. Opt. Soc. Rapid Publ. 2010, 5, 10014s. [Google Scholar] [CrossRef]
- Wernand, M.R.; Gieskes, W.W.C. Ocean Optics from 1600 (Hudson) to 1930 (Raman): Shifting Interpretation of Natural Water Colouring; Union des Océanographes de France: Paris, France, 2012; p. 88. [Google Scholar]
- Sandén, P.; Håkansson, B. Long-term trends in Secchi depth in the Baltic Sea. Limnol. Oceanogr. 1996, 41, 346–351. [Google Scholar] [CrossRef] [Green Version]
- Aksnes, D.L.; Ohman, M.D. Multi-decadal shoaling of the euphotic zone in the southern sector of the California Current System. Limnol. Oceanogr. 2009, 54, 1272–1281. [Google Scholar] [CrossRef] [Green Version]
- Boyce, D.G.; Lewis, M.R.; Worm, B. Global phytoplankton decline over the past century. Nature 2010, 466, 591–596. [Google Scholar] [CrossRef] [PubMed]
- Boyce, D.G.; Lewis, M.; Worm, B. Integrating global chlorophyll data from 1890 to 2010. Limnol. Oceanogr. Methods 2012, 10, 840–852. [Google Scholar] [CrossRef] [Green Version]
- Philippart, C.J.M.; Salama, M.S.; Kromkamp, J.C.; van der Woerd, H.J.; Zuur, A.F.; Cadée, G.C. Four decades of variability in turbidity in the western Wadden Sea as derived from corrected Secchi disk readings. J. Sea Res. 2013, 82, 67–79. [Google Scholar] [CrossRef]
- Wernand, M.R.; van der Woerd, H.J. Ocean colour changes in the North Pacific since 1930. J. Eur. Opt. Soc. Rapid Publ. 2010, 5, 10015s. [Google Scholar] [CrossRef]
- Wernand, M.R.; van der Woerd, H.J.; Gieskes, W.W.C. Trends in Ocean Colour and Chlorophyll Concentration from 1889 to 2000, Worldwide. PLoS ONE 2013, 8, e63766. [Google Scholar]
- Harrington, J.A.; Schiebe, F.R.; Nix, J.F. Remote Sensing of Lake Chicot, Arkansas: Monitoring Suspended Sediments, Turbidity, and Secchi Depth with Landsat MSS Data. Remote Sens. Environ. 1992, 39, 15–27. [Google Scholar] [CrossRef]
- Nelson, S.A.C.; Soranno, P.A.; Cheruvelil, K.S.; Batzli, S.A.; Skole, D.L. Regional assessment of lake water clarity using satellite remote sensing. J. Limnol. 2003, 62, 27–32. [Google Scholar] [CrossRef]
- Kratzer, S.; Håkansson, B.; Sahlin, C. Assessing Secchi and Photic Zone Depth in the Baltic Sea from Satellite Data. AMBIO J. Hum. Environ. 2003, 32, 577–585. [Google Scholar] [CrossRef]
- Kratzer, S.; Brockmann, C.; Moore, G. Using MERIS full resolution data to monitor coastal waters—A case study from Himmerfjärden, a fjord-like bay in the northwestern Baltic Sea. Remote Sens. Environ. 2008, 112, 2284–2300. [Google Scholar] [CrossRef]
- Morel, A.; Huot, Y.; Gentili, B.; Werdell, P.J.; Hooker, S.B.; Franz, B.A. Examining the consistency of products derived from various ocean color sensors in open ocean (case 1) waters in the perspective of a multi-sensor approach. Remote Sens. Environ. 2007, 111, 69–88. [Google Scholar] [CrossRef]
- Wernand, M.R.; Hommersom, A.; van der Woerd, H.J. MERIS-based ocean colour classification with the discrete Forel-Ule scale. Ocean Sci. 2013, 9, 477–487. [Google Scholar] [CrossRef]
- Lee, Z.; Shang, S.; Hu, C.; Du, K.; Weidemann, A.; Hou, W.; Lin, J.; Lin, G. Secchi disk depth: A new theory and mechanistic model for underwater visibility. Remote Sens. Environ. 2015, 169, 139–149. [Google Scholar] [CrossRef] [Green Version]
- van der Woerd, H.J.; Wernand, M.R. Hue-Angle Product for Low to Medium Spatial Resolution Optical Satellite Sensors. Remote Sens. 2018, 10, 180. [Google Scholar] [CrossRef]
- Wang, S.; Li, J.; Zhang, B.; Spyrakos, E.; Tyler, A.N.; Shen, Q.; Zhang, F.; Kuster, T.; Lehmann, M.K.; Wu, Y.; et al. Trophic state assessment of global inland waters using a MODIS-derived Forel-Ule index. Remote Sens. Environ. 2018, 217, 444–460. [Google Scholar] [CrossRef]
- Preisendorfer, R.W. Secchi disk science: Visual optics of natural waters. Limnol. Oceanogr. 1986, 31, 909–926. [Google Scholar] [CrossRef] [Green Version]
- Lottig, N.R.; Wagner, T.; Norton Henry, E.; Spence Cheruvelil, K.; Webster, K.E.; Downing, J.A.; Stow, C.A. Long-Term Citizen-Collected Data Reveal Geographical Patterns and Temporal Trends in Lake Water Clarity. PLoS ONE 2014, 9. [Google Scholar] [CrossRef]
- Garaba, S.P.; Friedrichs, A.; ans Voß, D.; Zielinski, O. Classifying Natural Waters with the Forel-Ule Colour Index System: Results, Applications, Correlations and Crowdsourcing. Int. J. Environ. Res. Public Health 2015, 12, 16096–16109. [Google Scholar] [CrossRef] [Green Version]
- Busch, J.A.; Bardaji, R.; Ceccaroni, L.; Friedrichs, A.; Piera, J.; Simon, C.; Thijsse, P.; Wernand, M.; van der Woerd, H.J.; Zielinski, O.; et al. Citizen bio-optical observations from coast-and ocean and their compatibility with ocean colour satellite measurements. Remote Sens. 2016, 8, 879. [Google Scholar] [CrossRef]
- Busch, J.A.; Price, I.; Jeansou, E.; Zielinski, O.; van der Woerd, H.J. Citizens and satellites: Assessment of phytoplankton dynamics in a NW Mediterranean aquaculture zone. Int. J. Appl. Earth Observ. Geoinf. 2016, 47, 40–49. [Google Scholar] [CrossRef]
- Seafarers, S.D.; Lavender, S.; Beaugrand, G.; Outram, N.; Barlow, N.; Crotty, D.; Evans, J.; Kirby, R. Seafarer citizen scientist ocean transparency data as a resource for phytoplankton and climate research. PLoS ONE 2017, 12. [Google Scholar] [CrossRef] [PubMed]
- Jones, N. Science in three dimensions. The print revolution: Three-dimensional printers are opening up new worlds to research. Nature 2012, 487, 22–23. [Google Scholar] [CrossRef] [PubMed]
- Shimizu, T.S.; Le Novére, N.; Levin, M.D.; Beavil, A.J.; Sutton, B.J.; Bray, D. Molecular model of a lattice of signalling proteins involved in bacterial chemotaxis. Nat. Cell Biol. 2000, 2, 792–796. [Google Scholar] [CrossRef] [PubMed]
- Gillet, A.; Sanner, M.; Stoffler, D.; Olson, A. Tangible Interfaces for Structural Molecular Biology. Structure 2005, 13, 483–491. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ponce de León, M.S.; Golovanova, L.; Doronichev, V.; Romanova, G.; Akazawa, T.; Kondo, O.; Ishida, Y.H.; Zollikofer, C.P.E. Neanderthal brain size at birth provides insights into the evolution of human life history. Proc. Natl. Acad. Sci. USA 2008, 105, 13764–13768. [Google Scholar] [CrossRef] [Green Version]
- Niven, L.; Steele, T.E.; Finke, H.; Gernat, T.; Hublin, J.J. Virtual skeletons: using a structured light scanner to create a 3D faunal comparative collection. J. Archaeol. Sci. 2009, 36, 2018–2023. [Google Scholar] [CrossRef]
- Hutmacher, D.; Sittinger, M.; Risbud, M. Scaffold-based tissue engineering: Rationale for computer aided design and solid free-form fabrication systems. Trends Biotechnol. 2004, 22, 354–362. [Google Scholar] [CrossRef]
- Saunders, R.E.; Gough, J.E.; Derby, B. Delivery of human fibroblast cells by piezoelectric drop-on-demand inkjet printing. Biomaterials 2008, 29, 193–203. [Google Scholar] [CrossRef] [PubMed]
- Symes, M.D.; Kitson, P.J.; Yan, J.; Richmond, C.J.; Cooper, G.J.T.; Bowman, R.W.; Vilbrandt, T.; Cronin, L. Integrated 3D-printed reactionware for chemical synthesis and analysis. Nat. Chem. 2012, 4, 349–354. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, A. 3-D Printers Spread From Engineering Departments to Designs Across Disciplines. Chron. High. Educ. 2012, 59, A24–A25. [Google Scholar]
- Rangel, D.P.; Superak, C.; Bielschowsky, M.; Farris, K.; Falconer, R.E.; Baveye, P.C. Rapid Prototyping and 3-D Printing of Experimental Equipment in Soil Science Research. Soil Sci. Soc. Am. J. 2013, 77, 54–59. [Google Scholar] [CrossRef]
- Waldbaur, A.; Rapp, H.; Lang, K.; Rapp, B.E. Let there be chip-towards rapid prototyping of microfluidic devices: One-step manufacturing processes. Anal. Methods 2011, 3, 2681–2716. [Google Scholar] [CrossRef]
- Mohammed, J.S. Applications of 3D printing technologies in oceanography. Methods Oceanogr. 2016, 17, 97–117. [Google Scholar] [CrossRef]
- Hou, W.; Lee, Z.; Weidemann, A.D. Why does the Secchi disk disappear? An imaging perspective. Opt. Express 2007, 15, 2791–2802. [Google Scholar] [CrossRef]
- Donlon, C.J.; Wimmer, W.; Robinson, I.; Fisher, G.; Ferlet, M.; Nightingale, T.; Bras, B. A second-generation blackbody system for the calibration and verification of seagoing infrared radiometers. J. Atmos. Ocean. Technol. 2014, 31, 1104–1127. [Google Scholar] [CrossRef]
- Kumar, R.; Raman, N.N.; Pranav, P.; Pamanna, D.; Amin, A.; Sumanjali, S.S. The physico-chemical characteristics of vembanad backwaters at Eramalloor region, Alappuzha district, Kerala, India. Int. J. Fish. Aquat. Stud. 2017, 5, 258–262. [Google Scholar]
- Buckley, R. Surf tourism and sustainable development in Indo-Pacific Islands. I. The industry and the islands. J. Sustain. Tour. 2002, 10, 405–424. [Google Scholar] [CrossRef]
- Cisneros-Montemayor, A.M.; Sumaila, U.R. A global estimate of benefits from ecosystem-based marine recreation: Potential impacts and implications for management. J. Bioecon. 2010, 12, 245–268. [Google Scholar] [CrossRef]
- Brewin, R.J.W.; Hyder, K.; Andersson, A.J.; Billson, O.; Bresnahan, P.J.; Brewin, T.G.; Cyronak, T.; Dall’Olmo, G.; de Mora, L.; Graham, G.; et al. Expanding aquatic observations through recreation. Front. Mar. Sci. 2017, 4, 351. [Google Scholar] [CrossRef]
- Brewin, R.J.W.; de Mora, L.; Jackson, T.; Brewin, T.G.; Shutler, J. On the Potential of Surfers to Monitor Environmental Indicators in the Coastal Zone. PLoS ONE 2015, 10, e0127706. [Google Scholar] [CrossRef] [PubMed]
- Brewin, R.J.W.; de Mora, L.; Billson, O.; Jackson, T.; Russell, P.; Brewin, T.G.; Shutler, J.; Miller, P.I.; Taylor, B.H.; Smyth, T.; Fishwick, J.R. Evaluating operational AVHRR sea surface temperature data at the coastline using surfers. Estuar. Coast. Shelf Sci. 2017, 196, 276–289. [Google Scholar] [CrossRef]
- Bresnahan, P.J.; Cyronak, T.; Martz, T.; Andersson, A.; Waters, S.; Stern, A.; Richard, J.; Hammond, K.; Griffin, J.; Thompson, B. Engineering a Smartfin for surf-zone oceanography. In Proceedings of the OCEANS 2017—Anchorage, Anchorage, AK, USA, 18–21 September 2017; pp. 1–4. [Google Scholar]
- Boss, E.; Zaneveld, J.R.V. The effect of bottom substrate on inherent optical properties: Evidence of biogeochemical processes. Limnol. Oceanogr. 2003, 48, 346–354. [Google Scholar] [CrossRef] [Green Version]
- Wright, S.; Hull, T.; Sivyer, D.B.; Pearce, D.; Pinnegar, J.K.; Sayer, M.D.J.; Mogg, A.O.M.; Azzopardi, E.; Gontarek, S.; Hyder, K. SCUBA divers as oceanographic samplers: The potential of dive computers to augment aquatic temperature monitoring. Sci. Rep. 2016, 6, 1–8. [Google Scholar] [CrossRef]
- Egi, S.; Cousteau, P.Y.; Pieri, M.; Cerrano, C.; Özyigit, T.; Marroni, A. Designing a Diving Protocol for Thermocline Identification Using Dive Computers in Marine Citizen Science. Appl. Sci. 2018, 8, 2315. [Google Scholar] [CrossRef]
- Bresnahan, P.J.; Wirth, T.; Martz, T.R.; Andersson, A.J.; Cyronak, T.; D’Angelo, S.; Pennise, J.; Melville, W.K.; Lenain, L.; Statom, N. A sensor package for mapping pH and oxygen from mobile platforms. Methods Oceanogr. 2016, 17, 1–13. [Google Scholar] [CrossRef]
- Lauro, F.M.; Senstius, S.J.; Cullen, J.; Neches, R.; Jensen, R.M.; Brown, M.V.; Darling, A.E.; Givskov, M.; McDougald, D.; Hoeke, R.; et al. The Common Oceanographer: Crowdsourcing the Collection of Oceanographic Data. PLoS Biol. 2014, 12, e1001947. [Google Scholar] [CrossRef]
- Davies, B.R.; Biggs, J.; Williams, P.J.; Lee, J.T.; Thompson, S. A comparison of the catchment sizes of rivers, streams, ponds, ditches and lakes: Implications for protecting aquatic biodiversity in an agricultural landscape. Hydrobiologia 2008, 597, 7–17. [Google Scholar] [CrossRef]
- Tittensor, D.P.; Mora, C.; Jetz, W.; Lotze, H.K.; Ricard, D.; Berghe, E.V.; Worm, B. Global patterns and predictors of marine biodiversity across taxa. Nature 2010, 466, 1098–1103. [Google Scholar] [CrossRef] [PubMed]
- Dudgeon, D.; Arthington, A.H.; Gessner, M.O.; Kawabata, Z.I.; Knowler, D.J.; Lévêque, C.; Naiman, R.J.; Prieur-Richard, A.H.; Soto, D.; Stiassny, M.L.; et al. Freshwater biodiversity: Importance, threats, status and conservation challenges. Biol. Rev. 2006, 81, 163–182. [Google Scholar] [CrossRef] [PubMed]
- Postel, S.; Carpenter, S. Nature’s Services: Societal Dependence on Natural Ecosystems; Chapter Freshwater Ecosystem Services; Island Press: Washington, DC, USA, 1997; p. 195. [Google Scholar]
- Lee, Z.; Shang, S.; Lin, G.; Liu, T.; Liu, Y.; Du, K.; Luis, K. Secchi disk observation with spectral-selective glasses in blue and green waters. Opt. Express 2017, 25, 19878–19885. [Google Scholar] [CrossRef] [PubMed]
- Karp-Boss, L.; Boss, E.; Weller, H.; Loftin, J.; Albright, J. Teaching Physical Concepts on Oceanography: An Inquiry-Based Approach. Oceanography 2009, 22. [Google Scholar] [CrossRef]
- NASA. MODIS-Aqua Ocean Color Data; NASA Goddard Space Flight Center, Ocean Ecology Laboratory, Ocean Biology Processing Group. 2014. Available online: http://dx.doi.org/10.5067/AQUA/MODIS_OC.2014.0 (accessed on 28 July 2015).
- Donlon, C. Sentinel-3 Mission Requirements Traceability Document (MRTD). Technical Report. 2011. Available online: http://download.esa.int/docs/EarthObservation/GMES_Sentinel-3_MRTD_Iss-1_Rev-0-issued-signed.pdf (accessed on 5 September 2017).
- GCOS. Systematic Observation Requirements from Satellite-Based Data Products for Climate; Technical Report; 7 bis, avenue de la Paix, CH-1211; World Meteorological Organisation (WMO): Geneva, Switzerland, 2011. [Google Scholar]
- Bojinski, S.; Verstraete, M.; Peterson, T.; Richter, C.; Simmons, A.; Zemp, M. The concept of essential climate variables in support of climate research, applications, and policy. Bull. Am. Meteorol. Soc. 2014, 95, 1431–1443. [Google Scholar] [CrossRef]
- Brewin, R.J.W.; Smale, D.A.; Moore, P.J.; Dall’Olmo, G.; Miller, P.I.; Taylor, B.; Smyth, T.J.; Fishwick, J.R.; Yang, M. Evaluating Operational AVHRR Sea Surface Temperature Data at the Coastline Using Benthic Temperature Loggers. Remote Sens. 2018, 10, 925. [Google Scholar] [CrossRef]
- Garrabou, J.; Coma, R.; Bensoussan, N.; Bally, M.; Chevaldonne, P.; Cigliano, M.; Diaz, D.; Harmelin, J.G.; Gambi, M.C.; Kersting, D.K.; et al. Mass mortality in Northwestern Mediterranean rocky benthic communities: Effects of the 2003 heat wave. Glob. Chang. Biol. 2009, 15, 1090–1103. [Google Scholar] [CrossRef]
- Poloczanska, E.S.; Brown, C.J.; Sydeman, W.J.; Kiessling, W.; Schoeman, D.S.; Moore, P.J.; Brander, K.; Bruno, J.F.; Buckley, L.B.; Burrows, M.T.; et al. Global imprint of climate change on marine life. Nat. Clim. Chang. 2013, 3, 919–925. [Google Scholar] [CrossRef] [Green Version]
- Vergés, A.; Steinberg, P.D.; Hay, M.E.; Poore, A.G.B.; Campbell, A.H.; Ballesteros, E.; Heck, K.L.; Booth, D.J.; Coleman, M.A.; Feary, D.A.; et al. The tropicalization of temperate marine ecosystems: Climate-mediated changes in herbivory and community phase shifts. Proc. R. Soc. B Biol. Sci. 2014, 281. [Google Scholar] [CrossRef]
- Wernberg, T.; Bennett, S.; Babcock, R.C.; de Bettignies, T.; Cure, K.; Depczynski, M.; Dufois, F.; Fromont, J.; Fulton, C.J.; Hovey, R.K.; et al. Climate-driven regime shift of a temperate marine ecosystem. Science 2016, 353, 169–172. [Google Scholar] [CrossRef] [Green Version]
- Powell, T. Ecological Time Series; Chapter Physical and Biological Scales of Variability in Lakes, Estuaries, and the Coastal Ocean; Springer: Boston, MA, USA, 1995; pp. 119–138. [Google Scholar]
- Sathyendranath, S.; Platt, T. Spectral effects in bio-optical control on the ocean system. Oceanologia 2007, 49, 5–39. [Google Scholar]
- Brabyn, L.; Zawar-Reza, P.; Stichbury, G.; Cary, C.; Storey, B.; Laughlin, D.C.; Katurji, M. Accuracy assessment of land surface temperature retrievals from Landsat 7 ETM+ in the Dry Valleys of Antarctica using iButton temperature loggers and weather station data. Environ. Monitor. Assess. 2014, 186, 2619–2628. [Google Scholar] [CrossRef] [PubMed]
- Borja, A. The European water framework directive: A challenge for nearshore, coastal and continental shelf research. Cont. Shelf Res. 2005, 25, 1768–1783. [Google Scholar] [CrossRef]
- Fabricius, K.E.; Cooper, T.F.; Humphrey, C.; Uthicke, S.; De’ath, G.; Davidson, J.; LeGrand, H.; Thompson, A.; Schaffelke, B. A bioindicator system for water quality on inshore coral reefs of the Great Barrier Reef. Mar. Pollut. Bull. 2012, 65, 320–332. [Google Scholar] [CrossRef] [PubMed]
- Pitarch, J. Biases in ocean color over a Secchi disk. Opt. Express 2017, 25, A1124–A1131. [Google Scholar] [CrossRef] [PubMed]
- Novoa, S.; Wernand, M.R.; van der Woerd, H.J. The modern Forel-Ule scale: A ‘do-it-yourself’ colour comparator for water monitoring. J. Eur. Opt. Soc. Rapid Publ. 2014, 9, 1–10. [Google Scholar] [CrossRef]
- Sung, Y.; Campa, F.; Shih, W.C. Open-source do-it-yourself multi-color fluorescence smartphone microscopy. Opt. Express 2017, 8, 5075–5086. [Google Scholar] [CrossRef]
- Friedrichs, A.; Busch, J.A.; van der Woerd, H.J.; Zielinski, O. SmartFluo: A Method and Affordable Adapter to Measure Chlorophyll a Fluorescence with Smartphones. Sensors 2017, 17, 678. [Google Scholar] [CrossRef]
- Leeuw, T.; Boss, E. The HydroColor App: Above Water Measurements of Remote Sensing Reflectance and Turbidity Using a Smartphone Camera. Sensors 2018, 18, 256. [Google Scholar] [CrossRef]
- Leeuw, T.; Boss, E.S.; Wright, D.L. In situ measurements of phytoplankton fluorescence using low cost electronics. Sensors 2013, 13, 7872–7883. [Google Scholar] [CrossRef]
- Williams, K.; De Robertis, A.; Berkowitz, Z.; Rooper, C.; Towler, R. An underwater stereo-camera trap. Methods Oceanogr. 2014, 11, 1–12. [Google Scholar] [CrossRef]
- Bardaji, R.; Sánchez, A.M.; Simon, C.; Wernand, M.R.; Piera, J. Estimating the underwater diffuse attenuation coefficient with a low-cost instrument: The KdUINO DIY buoy. Sensors 2016, 16, 373. [Google Scholar] [CrossRef] [PubMed]
- JCGM. Evaluation of Measurement Data—Guide to the Expression of Uncertainty in Measurement; JCGM 100:2008 (GUM 1995 with Minor Corrections); Technical Report; BIPM, IEC, IFCC, ILAC, ISO, IUPAC, IUPAP and OIML; JCGM, 2008. Available online: https://ncc.nesdis.noaa.gov/documents/documentation/JCGM_100_2008_E.pdf (accessed on 7 February 2019).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Figure 2a Index | Description | Materials | Manufacture or Purchase Method | Dimensions |
|---|---|---|---|---|---|
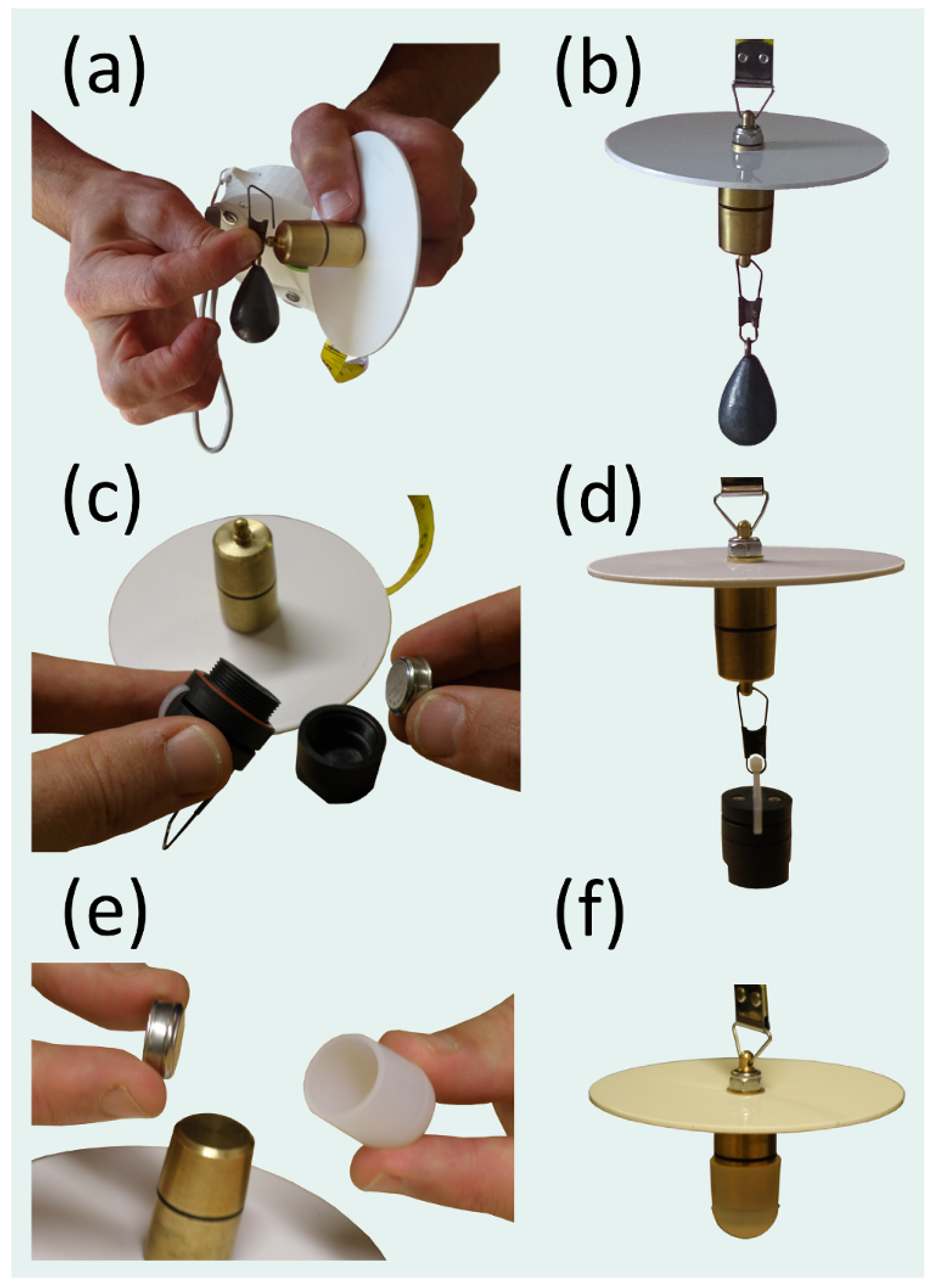
| Weight | 1 | To ensure the Secchi disk sinks vertically. | We tested various materials and eventually chose marine grade brass as it is very dense and to minimise corrosion when operated in the marine environment. The weight is 100 g. Two designs are provided. One includes an attachment to allow extra weight to be added, when operated in currents, and for attaching additional sensors, for example, a temperature sensor (see Figure 6). | For single production the weight can be produced (home-made) using a metal lathe (see dimensions of weight in Supplementary data 1). For batch production, the weight can be computer numerical control (CNC) machined by any local CNC company from the STL file (see Supplementary data 2; we have used G&J Services Ltd in Kent in the past (http://www.gandjcnc.co.uk) for some of our batch runs). It is also possible to 3D print the weight using a suitable metal filament and appropriate 3D printer. If you try this you want to achieve a weight of 100 g or heavier (we would be interested to know how you get on). | Technical drawing and STL file for both designs are provided in Supplementary data 1 and 2. |
| Weight O-ring | 2 | To ensure weight locks into bobbin. | Rubber. | Purchasable from gasket and bearing supplier. | Provided in Supplementary data 1 and 2. |
| Weight washer | 3 | Separates disk from weight. | Brass or stainless steel. | Purchasable from a hardware store. | Standard M6 washer (12 mm outside diameter, 6.4 mm centre hole diameter and thickness 1.6 mm). |
| Secchi Disk | 4 | White Secchi disk. | Polypropylene. Very high resistance to UV. An oily plastic with good elastic properties. Resistant to becoming brittle and capable of retaining its colour over time. | Polypropylene sheet purchasable from hardware store or online plastic distributor. Can be manufactured at home or in a workshop using a compass to mark outer circle at 100 mm diameter, then cut using a bandsaw or by hand using coping saw. 6 mm hole drilled in the center. Can also be produced in batch using a laser cutter. | 100 mm diameter, 2 mm thick and 6 mm central hole. |
| Weight bolt nut | 5 | To secure weight to Secchi disk. | M6 brass or stainless steel nut with ’nyloc’ or nylon locking insert incorporated. | Purchasable from hardware store. | Standard M6 ‘nyloc’ nut. |
| Weight attachment circlip | 6 | Joins tape to the weight and Secchi disk. This must be bent to allow the start of the tape measure to be at the correct distance from the disk so the measurement is accurate (tape starts at ∼20 mm from disk). | Stainless steel. | 0.7 mm stainless steel rod cut to 30 mm with pliers, bent using a simple jig set into a 10 mm by 10 mm by 10 mm equilateral triangle and threaded onto the weight and stainless steel fastening on the end of the tape. We bought this from an online hardware store. Alternatively, you can buy a triangular stainless 0.7 mm corner clip from a hardware store and adjust it with long nose pliers and pincers to the correct length. Ensure circlip is strong enough to carry a sufficient load (in strong currents extra weight is required to sink disk vertically and there can be drag on the disk). | 10 mm by 10 mm by 10 mm equilateral triangle that is 0.7 mm thick. |
| Tape measure | 7 | Tape used to measure the Secchi depth (printed in imperial and metric units). Stitched to bobbin at one end and attached to weight at other end by stainless steel fastening. | Tape made from fibre-glass reinforced polypropylene. Fibre-glass tape makes it resistant to stretching and polypropylene material makes it resistance to wear in aquatic environments. Nylon thread and needle required for stitching tape to bobbin. Stainless steel fastening. | Tape purchasable from on-line provider or can be extracted from a standard fibre-glass tape measure purchased from hardware store or online (we have used the 10 m senator fibreglass tape measure from Cromwell tools (http://www.cromwell.co.uk) in the past). Stainless steel sheet (for fastening) purchased from hardware store and riveted onto tape at a distance of 20 mm into the tape using a rivet tool (20 mm distance allowing for circlip, weight bolt and weight nut). | 13 mm wide tape. Length of tape is dependent on size of casing and thickness of tape. The typical length used is 7 to 8 m. Stainless steel sheet 30 mm length, 13 mm width, and 0.2 mm thick. Two stainless steel 3.2 mm rivets. |
| Mini-Secchi casing | 8a,b | Structural casing of the mini-Secchi disk. Framework encasing the measuring tape and bobbin. | The casing is made from polylactic acid. This is a biodegradable thermoplastic devised from renewable resources or natural starch. Modern polylactic acid plastic has good structural properties and when deposed can be composted. | 3D printed using the Ultimaker 2 and 2+. Any 3D printer would work for this manufacturing process as the files are available in STL format. We used the Ultimaker as it is a robust, low-cost printer, and the software is open source and managed well by the company. We have clocked up almost four years of solid run time and these printers are still operating like new. Ultimaker Cura software allows for the nesting of components to make the printing process as efficient as possible. Once printed all parts require a post-print clean up. Depending on the quality of the print you have achieved will determine the clean up required. For FDM printers, a set of modelling making chisels are useful for the task. | STL file provided in Supplementary data 3. |
| Fixings 1 | 9a,b,c | Bolts and nuts to fix handle to bobbin. | Stainless steel. | Purchasable from hardware shop. | M2.5 nuts and bolts. Bolts are 10 mm long and have a countersunk flat screw head. |
| Bobbin | 10 | Cylinder holding the tape and for storing the weight. Rotates to wind tape in and out of casing. | Polylactic acid biodegradable thermoplastic (see mini-Secchi casing for details). | 3D printed using the Ultimaker 2 and 2+ (see mini-Secchi casing for details). Two parts printed separately. In order to have a very accurate fit for the brass weight we printed the bobbin with a high-quality fill and finish. The two parts were glued together with an industrial super glue using a 19 mm bar inserted into the hole in the middle of each component to insure parts were accurately aligned. 20 mm reamer bit used to finish inside hole for accurate fit to brass weight (either by mounting reamer bit in the jaws of a metal work lathe and sliding the bobbin over from end to end, or reaming by hand using a decent pair of gloves). | STL files provided in Supplementary data 3. |
| Handle | 11a,b | Handle used to wind tape in and out of casing. Two separate components to allow for efficient rotation. Fixed together with a stainless steel nut and bolt (see Fixings 1). | Polylactic acid biodegradable thermoplastic (see mini-Secchi casing for details) | 3D printed using the Ultimaker 2 and 2+ (see mini-Secchi casing for details). | STL files provided in Supplementary data 3. |
| Colour scale | 12 | Vinyl-laminated Forel Ule colour scale sticker. Red Green Blue (RGB) colours for each Forel Ule colour were taken from Wernand et al. [19], see their Table 5. | Synthetic textile fibre (long-chain polymer) consisting of vinyl alcohol units. | Printed using a vinyl printer. | Example vinyl print file provided in Supplementary data 4. |
| Lanyard | 13 | Standard camera wrist lanyard for carrying the device and for preventing the device from dropping when in use. | Nylon. | Purchasable from a camera shop or online. | 180 mm length. |
| Finger strap | 14 | Used to hold the device safely when in operation (by slipping one or two fingers under the strap). | 0.5 mm polypropylene. Very high resistance to UV. An oily plastic with good elastic properties. High resistance to becoming brittle and capable of retaining its colour over time. | Technical drawing can be overlain onto polypropylene sheet as a template (stuck down using masking tape or spray mount) and cut out with scissors or a craft knife. Can also be laser cut from the template. | Technical drawing provided in Supplementary data 5. |
| Fixings 2 | 15a,b | Bolts to fix casing together. These screw directly into the 3D printed casing. | Stainless steel. | Purchasable from hardware shop. | M2.5 nuts and bolts. Bolts are 10 mm long and have a countersunk flat screw head. |
| Fixings 3 | 16a,b | Bolts, washers and nuts to fix finger strap to casing. Nuts fit into body of the chassis. | Stainless steel. | Purchasable from hardware shop. | M2.5 nuts, washers and bolts. Bolts are 10 mm long and have a countersunk flat screw head. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brewin, R.J.W.; Brewin, T.G.; Phillips, J.; Rose, S.; Abdulaziz, A.; Wimmer, W.; Sathyendranath, S.; Platt, T. A Printable Device for Measuring Clarity and Colour in Lake and Nearshore Waters. Sensors 2019, 19, 936. https://doi.org/10.3390/s19040936
Brewin RJW, Brewin TG, Phillips J, Rose S, Abdulaziz A, Wimmer W, Sathyendranath S, Platt T. A Printable Device for Measuring Clarity and Colour in Lake and Nearshore Waters. Sensors. 2019; 19(4):936. https://doi.org/10.3390/s19040936
Chicago/Turabian StyleBrewin, Robert J. W., Thomas G. Brewin, Joseph Phillips, Sophie Rose, Anas Abdulaziz, Werenfrid Wimmer, Shubha Sathyendranath, and Trevor Platt. 2019. "A Printable Device for Measuring Clarity and Colour in Lake and Nearshore Waters" Sensors 19, no. 4: 936. https://doi.org/10.3390/s19040936