“Garbage in, Garbage Out” Does Not Hold True for Indigenous Community Flood Extent Modeling in the Prairie Pothole Region

 ,
,
Abstract
:1. Introduction
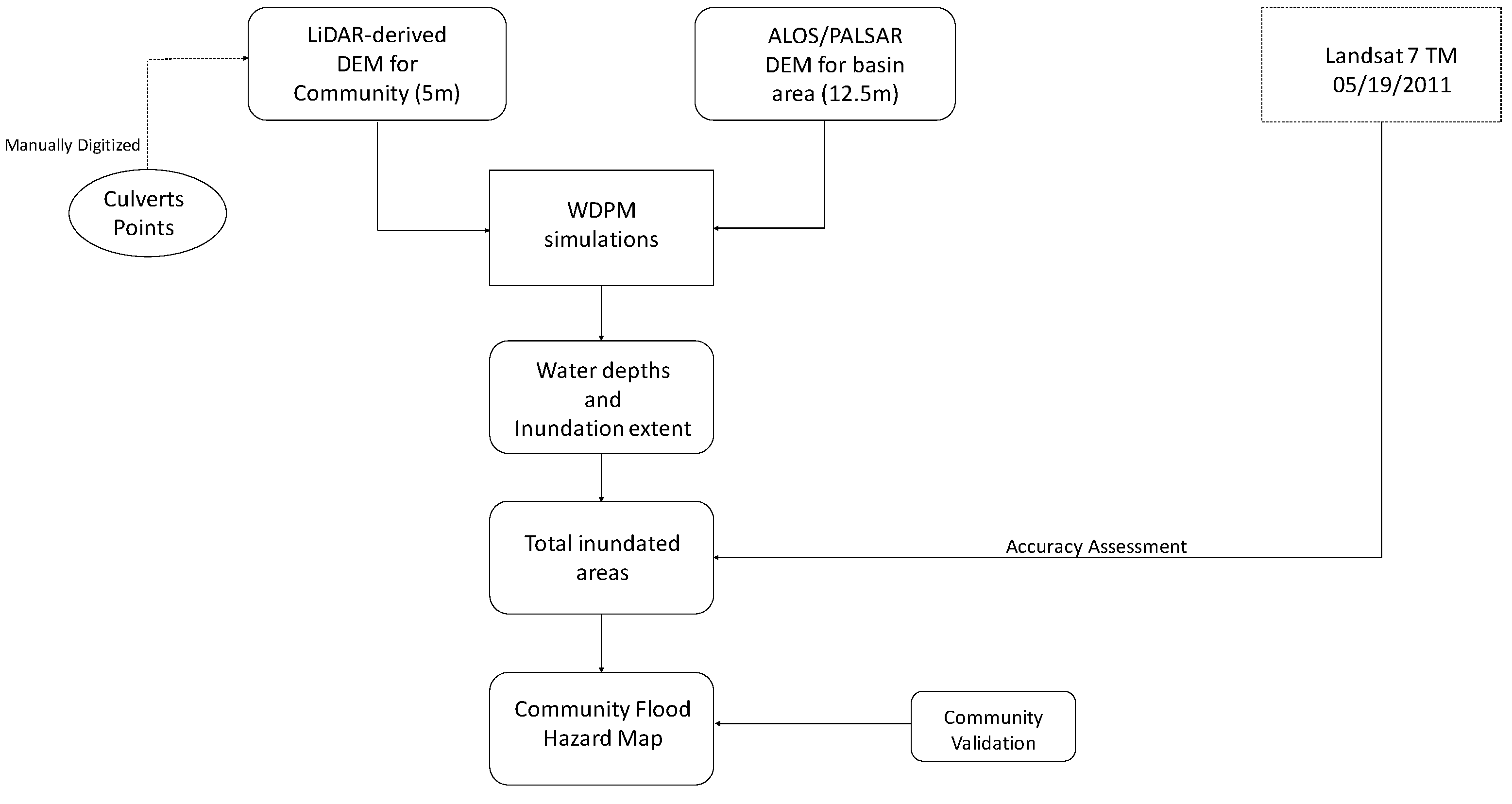
- Assess the ability to combine data from LiDAR, a physical survey of culverts, and WDPM to accurately portray flood extent in PPR;
- Model flood extent through community-driven flood scenarios and produce meta-data to support community decision making for flood resilience;
- Evaluate the utility of the modeling pathway and meta-data using satellite imagery and community reflection.
2. Materials and Methods
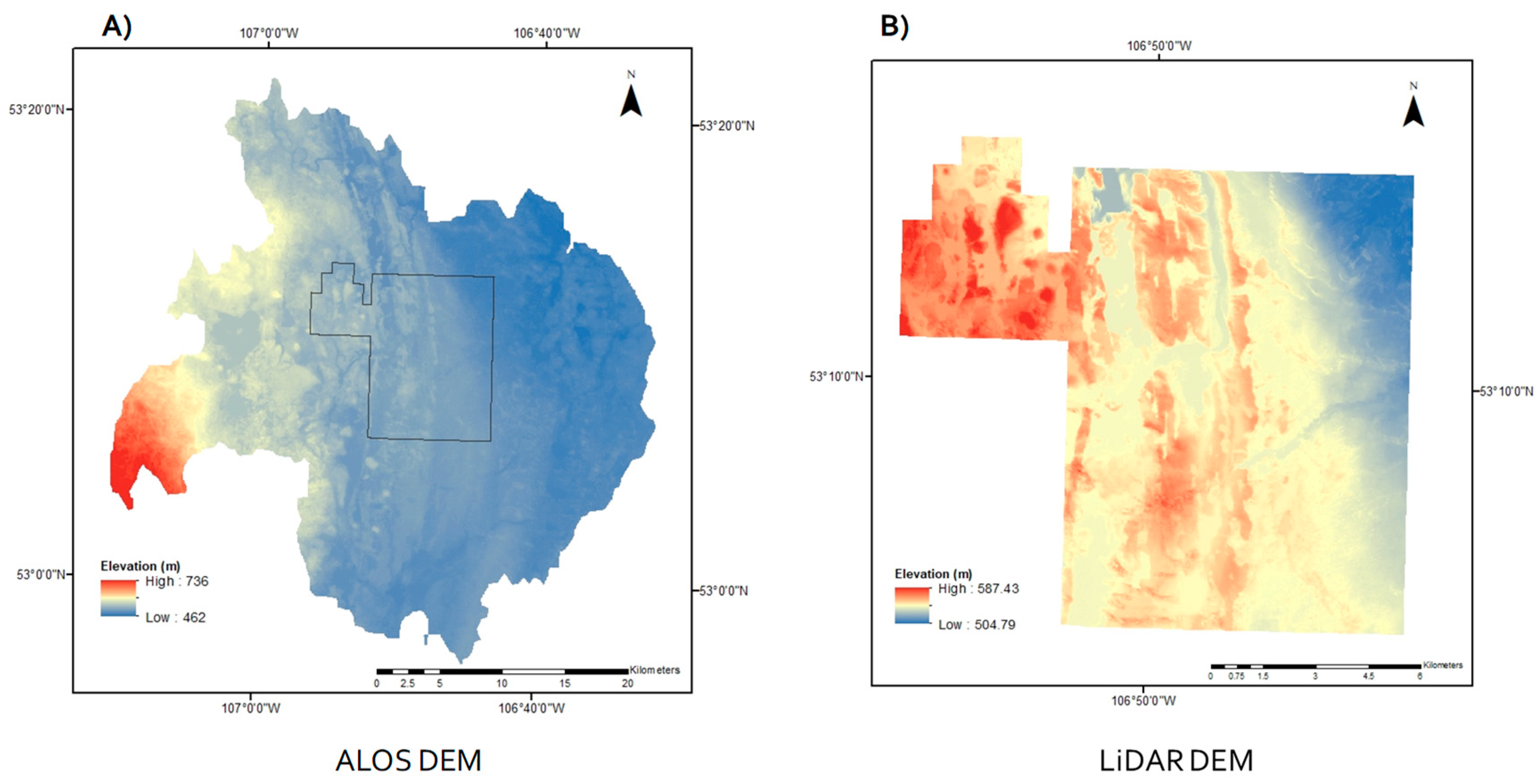
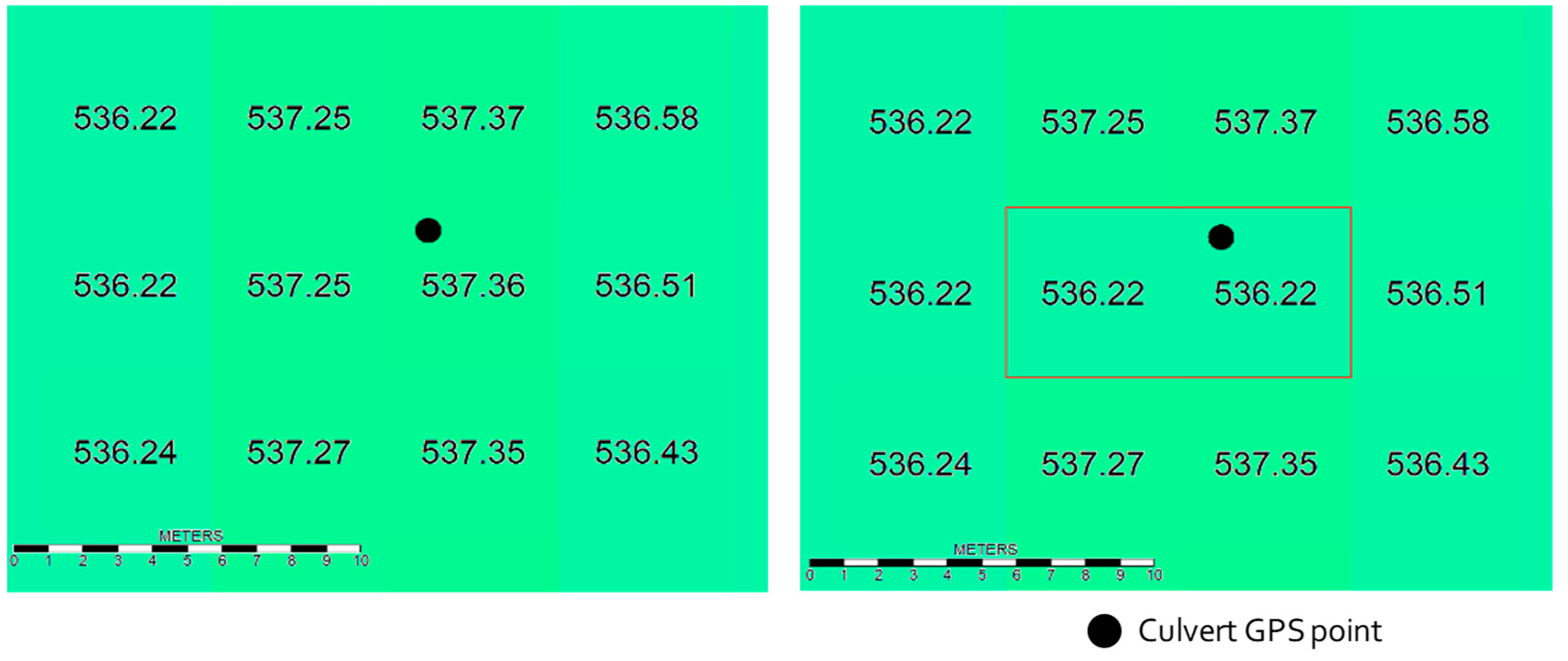
2.1. LiDAR DEM for Flood Mapping
2.2. Wetland Digital Elevation Model (DEM) Ponding Model (WDPM)
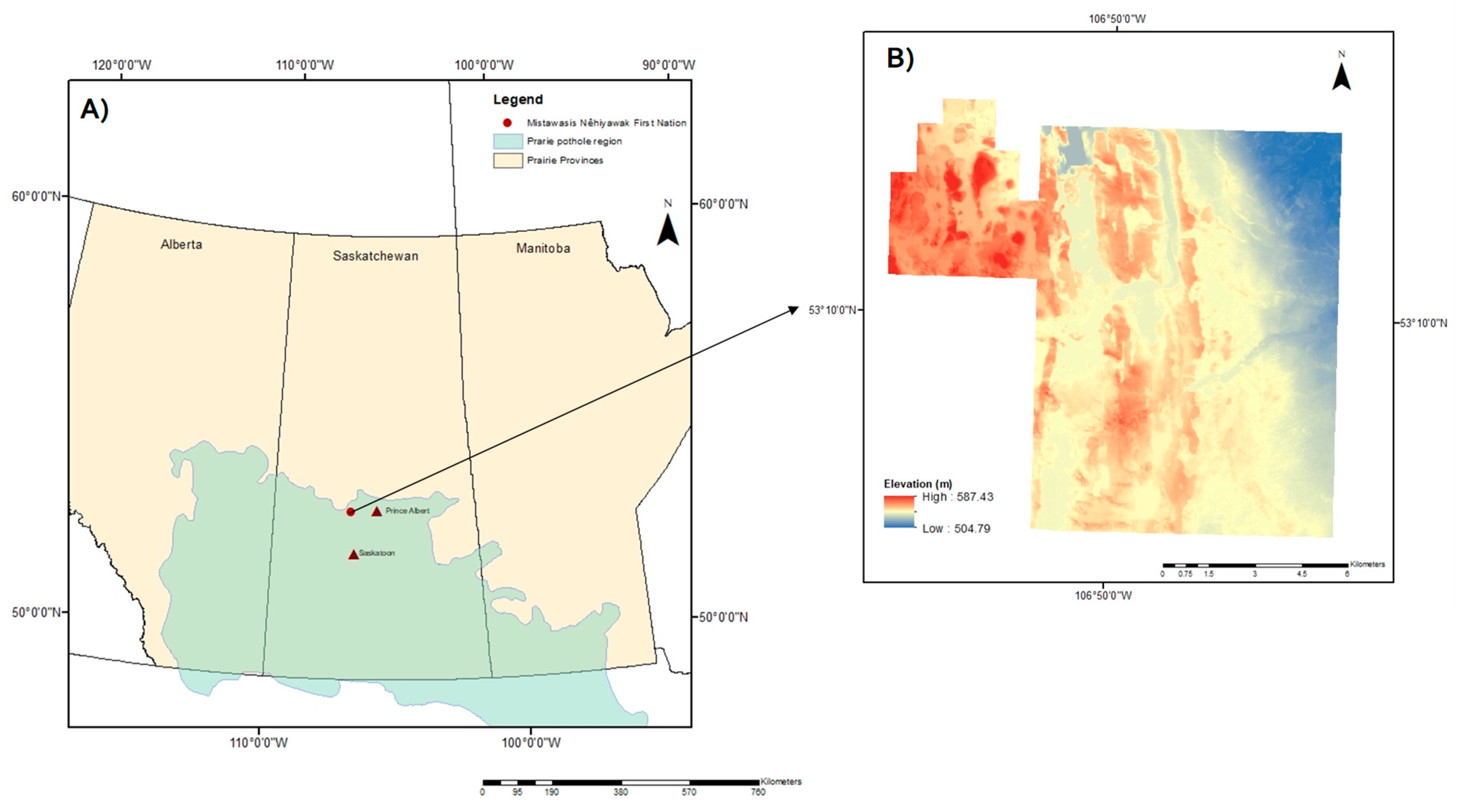
2.3. The Study Area
2.4. Spatial Datasets
2.5. Methodology for Generating Flood Extent Maps: Overview
3. Results
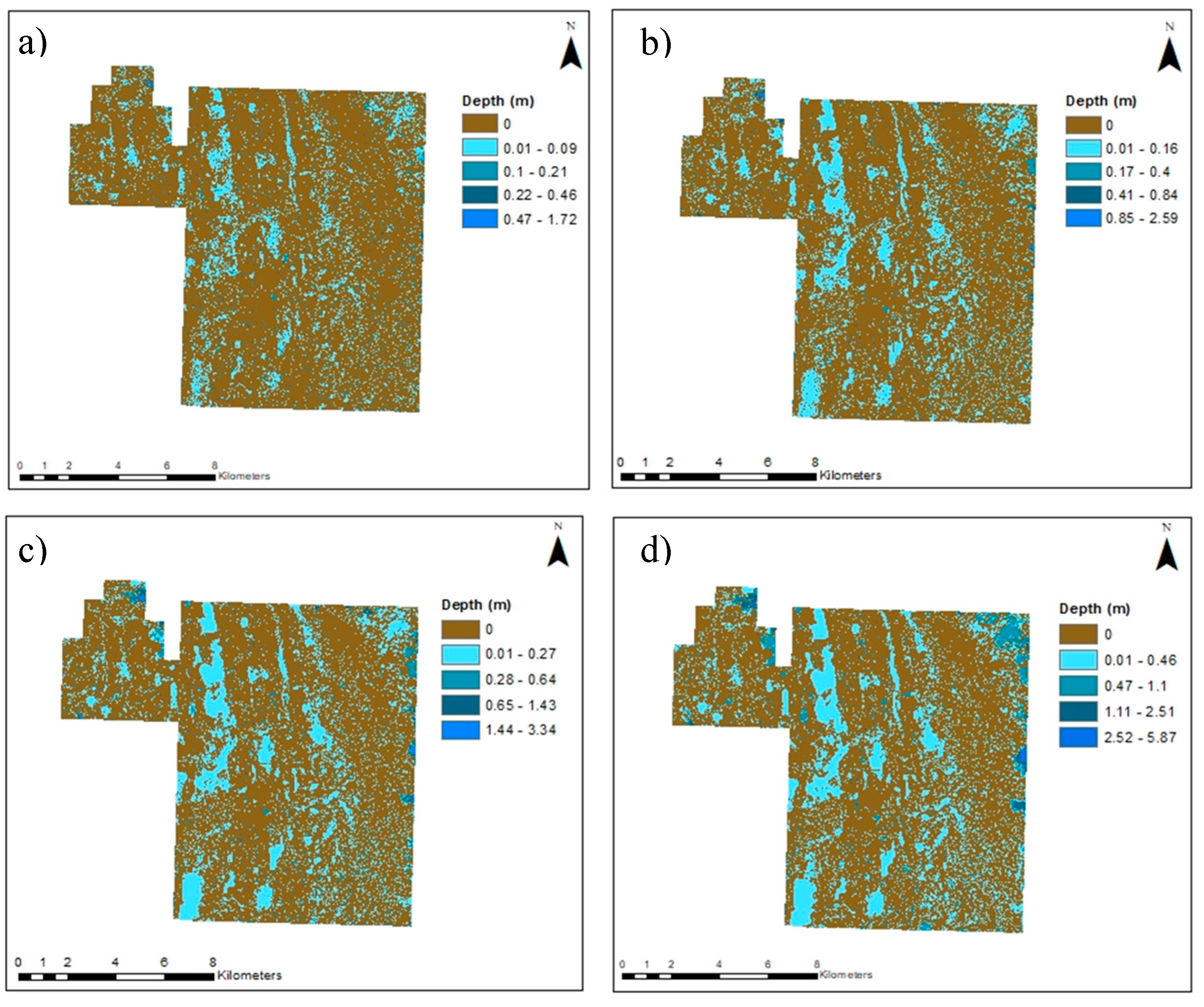
3.1. Evaluation of WDPM: Water Depth and Flood Hazard Map
3.2. Evaluation of WDPM: Accuracy Assessment
3.2.1. ALOS/PALSAR DEM
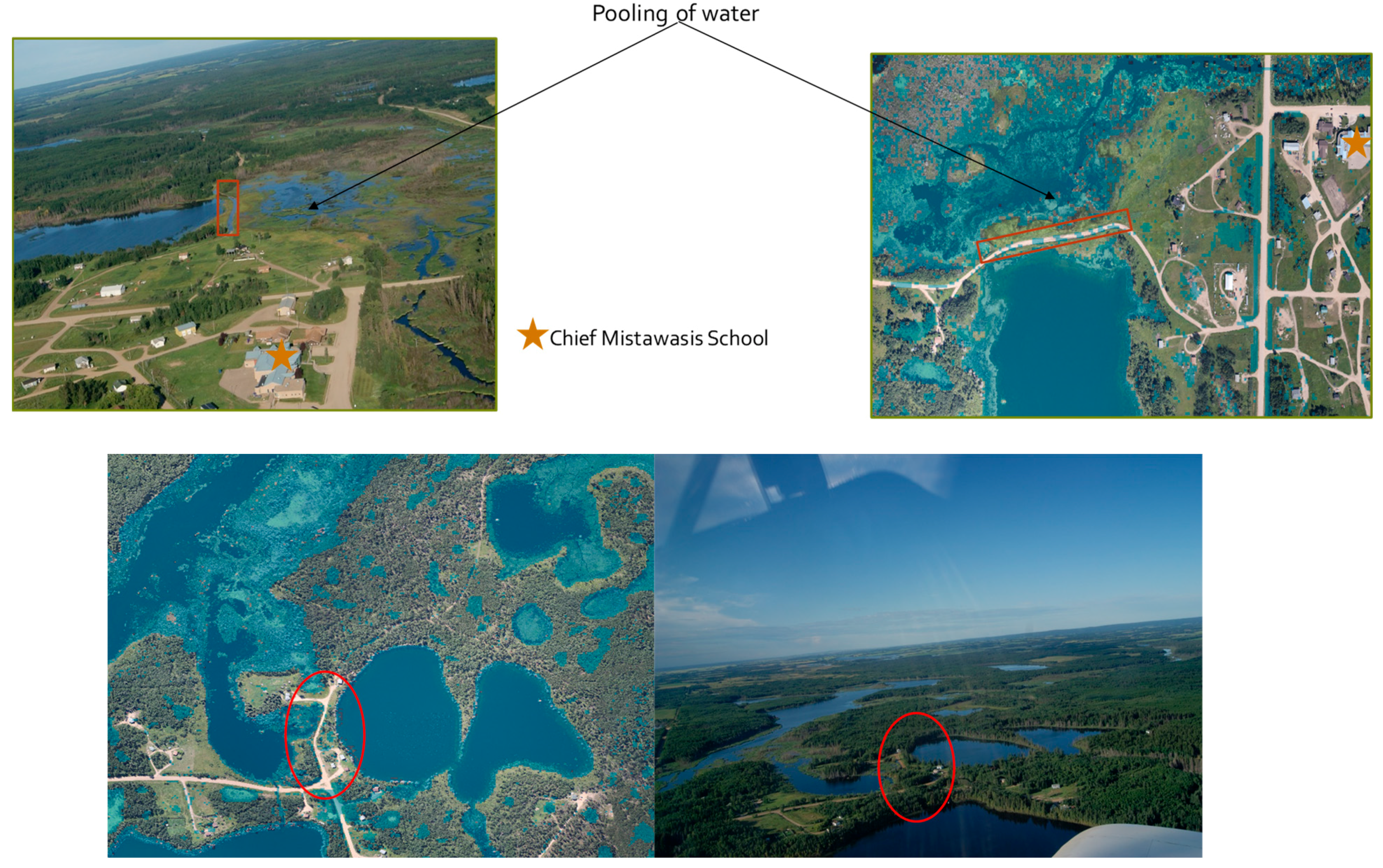
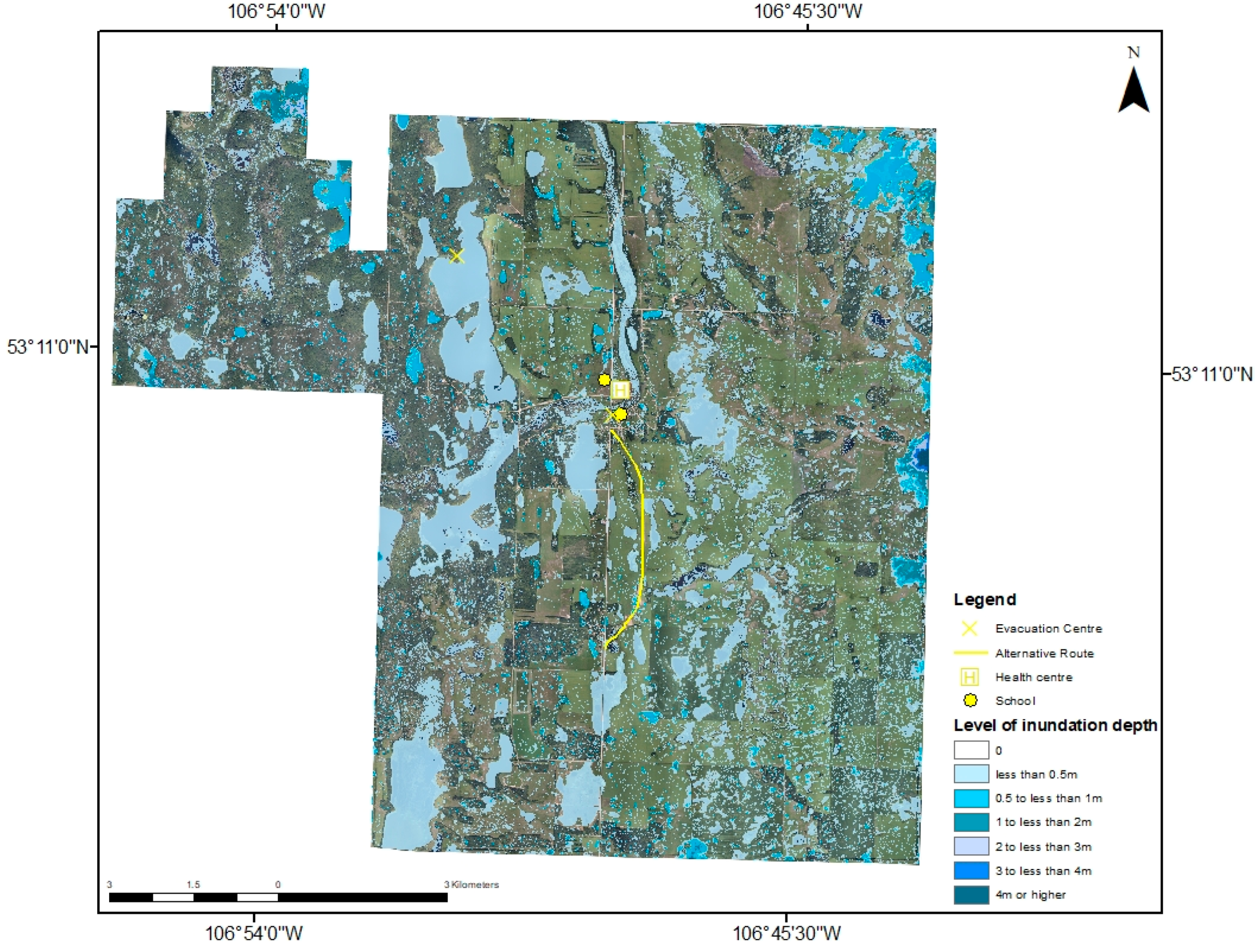
3.2.2. Satellite Imagery:
3.3. Evaluation of Flood Maps: Community Reflection
Focus Group Discussion
“This is the lake village we saw on, in the earlier map. So, this is where my brother used to be. So again, similar to what we’ve experienced around 2011–2012 when water was all pooling up here. These two houses almost had to be evacuated”—(MN-3).
“In the ends of like a flash flood, you get crazy amount of precipitation over like few hours, kind of how other places [Yorkton, Vanguard] did. Would the model give you an estimate of how it would look? […] that would give us more of an outline of something that would happen in the case of flash flood”—(MN-6).
“We travel on certain roads so we can see where the [flood] impacts are but having the picture of the whole reserve, there are places that we don’t go and don’t know have been impacted”—(MN-8).
“It opens my eyes to the importance of planning and being prepared. We need to do more in our preparation and in the studies and fill in all the blanks”—(MN-3).
4. Discussion
- Participation of public, local and indigenous communities is possible in otherwise traditionally top-down modeling practices and contributes to good practice in doing research. It also meets the calls of others doing community-engaged research or participatory research with local and indigenous communities [58,60,61,62,63,64].
- Engagement with communities facilitates the in-filling of some data gaps, overcoming unideal or incomplete data, and uncertainty in modeling. In our case, we overcame data deficiencies by being gifted access to the community-held data, co-collecting culvert points and co-validating flood maps. Furthermore, engagement can lead to the creation of innovative modeling approaches, the generation of new knowledge, and ultimately, the practicing of science that is relevant to greater society [12].
- Use of spatially focused tools in small, rural, and indigenous communities in the PPR can provide valuable information for identifying vulnerable regions, better spatial plans, and accordingly, better response or management strategies for floods [11].
- LiDAR, although an expensive tool, is a worthwhile investment, particularly in relatively flat areas such as the PPR. Investment and access to LiDAR at the catchment scale would improve the estimation of flood extent and flood risk. It would help to plan efficient management strategies and reduce the cost of flood damage and recovery in long run.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Hellman, J. Living with floods and coping with vulnerability. Disaster Prev. Manag. 2015, 24, 468–483. [Google Scholar] [CrossRef]
- Kourgialas, N.N.; Karatzas, G.P. Flood management and a GIS modelling method to assess flood-hazard areas—A case study. Hydrol. Sci. J. 2011, 56, 212–225. [Google Scholar] [CrossRef]
- Klemas, V. Remote Sensing of Floods and Flood-Prone Areas: An Overview. J. Coast. Res. 2015, 314, 1005–1013. [Google Scholar] [CrossRef]
- Samuels, P.; Klijn, F.; Dijkman, J. An analysis of the current practice of policies on river flood risk management in different countries. Irrig. Drain. 2006, 55, 25–27. [Google Scholar] [CrossRef]
- Shook, K.; Pomeroy, J.W. Memory effects of depressional storage in Northern Prairie hydrology. Hydrol. Process. 2011, 25, 3890–3898. [Google Scholar] [CrossRef]
- Dumanski, S.; Pomeroy, J.W.; Westbrook, C.J. Hydrological regime changes in a Canadian Prairie basin. Hydrol. Process. 2015, 29, 3893–3904. [Google Scholar] [CrossRef]
- Spence, C.; Woo, M.K. Hydrology of subarctic Canadian shield: Soil-filled valleys. J. Hydrol. 2003, 279, 151–166. [Google Scholar] [CrossRef]
- Wu, Q. GIS and Remote Sensing Applications in Wetland Mapping and Monitoring. Compr. Geogr. Inf. Syst. 2017, 140–157. [Google Scholar] [CrossRef]
- Buttle, J.M.; Allen, D.M.; Caissie, D.; Davison, B.; Hayashi, M.; Peters, D.L.; Pomeroy, J.W.; Simonovic, S.; St-Hilaire, A.; Whitfield, P.H. Flood processes in Canada: Regional and special aspects. Can. Water Resour. J. 2016, 41, 7–30. [Google Scholar] [CrossRef]
- Cohen, S.; Brakenridge, G.R.; Kettner, A.; Bates, B.; Nelson, J.; McDonald, R.; Huang, Y.F.; Munasinghe, D.; Zhang, J. Estimating Floodwater Depths from Flood Inundation Maps and Topography. J. Am. Water Resour. Assoc. 2018, 54, 847–858. [Google Scholar] [CrossRef]
- Armstrong, R.; Kayter, K.; Shook, K.; Hill, H. Using the Wetland Dem Ponding Model. In Putting Prediction in Ungauged Basins into Practice; Canadian Water Resources Association: Canmore, AB, Canada, 2013; pp. 255–270. ISBN 1896513387. [Google Scholar]
- Landström, C.; Whatmore, S.J.; Lane, S.N.; Odoni, N.A.; Ward, N.; Bradley, S. Coproducing flood risk knowledge: Redistributing expertise in critical “participatory modelling”. Environ. Plan. A 2011, 43, 1617–1633. [Google Scholar] [CrossRef]
- Meyer, V.; Kuhlicke, C.; Luther, J.; Unnerstall, H.; Fuchs, S.; Priest, S.; Dorner, W.; Serrhini, K.; Pardoe, K.; McCarthy, S.; et al. Recommendations for the user-specific enhancement of flood maps. Nat. Hazards Earth Syst. Sci. 2012, 12, 1701–1716. [Google Scholar] [CrossRef]
- Minano, A. Using Flood Maps for Community Flood Risk Communication; Natural Resources Canada: Waterloo, ON, Canada, 2018. [Google Scholar]
- Forrester, J.; Cook, B.; Bracken, L.; Cinderby, S.; Donaldson, A. Combining participatory mapping with Q-methodology to map stakeholder perceptions of complex environmental problems. Appl. Geogr. 2015, 56, 199–208. [Google Scholar] [CrossRef]
- Gaillard, J.C.; Pangilinan, M.L.C.J.D. Participatory mapping for raising disaster risk awareness among the youth. J. Conting. Cris. Manag. 2010, 18, 175–179. [Google Scholar] [CrossRef]
- Chingombe, W.; Pedzisai, E.; Manatsa, D.; Mukwada, G.; Taru, P. A participatory approach in GIS data collection for flood risk management, Muzarabani district, Zimbabwe. Arab. J. Geosci. 2015, 8, 1029–1040. [Google Scholar] [CrossRef]
- Cheung, W.; Houston, D.; Schubert, J.E.; Basolo, V.; Feldman, D.; Matthew, R.; Sanders, B.F.; Karlin, B.; Goodrich, K.A.; Contreras, S.L.; et al. Integrating resident digital sketch maps with expert knowledge to assess spatial knowledge of flood risk: A case study of participatory mapping in Newport Beach, California. Appl. Geogr. 2016, 74, 56–64. [Google Scholar] [CrossRef]
- Voinov, A.; Bousquet, F. Modelling with stakeholders. Environ. Model. Softw. 2010, 25, 1268–1281. [Google Scholar] [CrossRef]
- Voinov, A.; Kolagani, N.; McCall, M.K.; Glynn, P.D.; Kragt, M.E.; Ostermann, F.O.; Pierce, S.A.; Ramu, P. Modelling with stakeholders—Next generation. Environ. Model. Softw. 2016, 77, 196–220. [Google Scholar] [CrossRef]
- Castillo-Rosas, J.; Diez-Rodríguez, J.; Jiménez-Vélez, A.; Núñez-Andrés, M.; Monguet-Fierro, J. Collection and Integration of Local Knowledge and Experience through a Collective Spatial Analysis. ISPRS Int. J. Geo-Inf. 2017, 6, 33. [Google Scholar] [CrossRef]
- Raymond, C.M.; Fazey, I.; Reed, M.S.; Stringer, L.C.; Robinson, G.M.; Evely, A.C. Integrating local and scientific knowledge for environmental management. J. Environ. Manag. 2010, 91, 1766–1777. [Google Scholar] [CrossRef]
- Agrawal, A. Agrawal Dismantling the divide between indigenous and western knowledge. Dev. Chang. 1995, 26, 413–439. [Google Scholar] [CrossRef]
- Sanyal, J.; Lu, X.X. Application of Remote Sensing in Flood Management with Special Reference to Monsoon Asia: A Review. Nat. Hazards 2004, 33, 283–301. [Google Scholar] [CrossRef]
- Webster, T.L.; Forbes, D.L.; Mac Kinnon, E.; Roberts, D. Flood-risk mapping for storm-surge events and sea-level rise using lidar for southeast New Brunswick. Can. J. Remote Sens. 2006, 32, 194–211. [Google Scholar] [CrossRef]
- Jain, S.K.; Singh, R.D.; Jain, M.K.; Lohani, A.K. Delineation of flood-prone areas using remote sensing techniques. Water Resour. Manag. 2005, 19, 333–347. [Google Scholar] [CrossRef]
- Brivio, P.A.; Colombo, R.; Maggi, M.; Tomasoni, R. Integration of remote sensing data and GIS for accurate mapping of flooded areas. Int. J. Remote Sens. 2002, 23, 429–441. [Google Scholar] [CrossRef]
- Wedajo, G.K. LiDAR DEM Data for Flood Mapping and Assessment; Opportunities and Challenges: A Review. J. Remote Sens. GIS 2018, 06, 2015–2018. [Google Scholar] [CrossRef]
- Schumann, G.J.-P.; Bates, P.D. Commentary: The Need for a High-Accuracy, Open-Access Global DEM. Front. Earth Sci. 2018, 6. [Google Scholar] [CrossRef]
- Schumann, G.; Matgen, P.; Cutler, M.E.J.; Black, A.; Hoffmann, L.; Pfister, L. Comparison of remotely sensed water stages from LiDAR, topographic contours and SRTM. ISPRS J. Photogramm. Remote Sens. 2008, 63, 283–296. [Google Scholar] [CrossRef]
- Shook, K.; Pomeroy, J.W.; Spence, C.; Boychuk, L. Storage dynamics simulations in prairie wetland hydrology models: Evaluation and parameterization. Hydrol. Process. 2013, 27, 1875–1889. [Google Scholar] [CrossRef]
- Shook, K.R.; Armstrong, R.; Sharomi, O.; Spiteri, R.; Pomeroy, J.W. The WDPM User’s Guide; 2014. Available online: https://www.usask.ca/hydrology/WDPM.php (accessed on 10 November 2018).
- Wu, Q.; Lane, C.R. Delineating wetland catchments and modeling hydrologic connectivity using lidar data and aerial imagery. Hydrol. Earth Syst. Sci. 2017, 21, 3579–3595. [Google Scholar] [CrossRef]
- Shapiro, M.; Westervelt, J. R.MAPCALC: An Algebra for GIS and Image Processing. 1992. Available online: http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.51.9471 (accessed on 3 May 2019).
- Saskatoon North Partnership for Growth Regional Plan. Available online: http://partnershipforgrowth.ca (accessed on 3 May 2019).
- Statistics Canada. 2016 Census Profile. Available online: https://www.statcan.gc.ca (accessed on 3 May 2019).
- Dawe, M.L. Mistawasis Nêhiyawak First NationSource Water Protection Plan. 2016. Available online: https://sens.usask.ca/documents/msem-projects/Mistawasis%20Nehiyawak%20SWP%20Planning%20Initiative_July30.pdf (accessed on 3 May 2019).
- LiDAR Services International Inc. Mistawasis LiDAR Survey Report. 2014. Available online: https://cloud.sdsc.edu/v1/AUTH_opentopography/www/metadata/2015SeedProject_Snyder_Nevada.pdf (accessed on 3 May 2019).
- Li, R.; Tang, Z.; Li, X.; Winter, J. Drainage Structure Datasets and Effects on LiDAR-Derived Surface Flow Modeling. ISPRS Int. J. Geo-Inf. 2013, 2, 1136–1152. [Google Scholar] [CrossRef]
- Lang, M.; McCarty, G.; Oesterling, R.; Yeo, I.Y. Topographic metrics for improved mapping of forested wetlands. Wetlands 2013, 33, 141–155. [Google Scholar] [CrossRef]
- Ngula Niipele, J.; Chen, J. The usefulness of alos-palsar dem data for drainage extraction in semi-arid environments in The Iishana sub-basin. J. Hydrol. Reg. Stud. 2019, 21, 57–67. [Google Scholar] [CrossRef]
- Sturm, M.; Taras, B.; Liston, G.E.; Derksen, C.; Jonas, T.; Lea, J. Estimating Snow Water Equivalent Using Snow Depth Data and Climate Classes. J. Hydrometeorol. 2010, 11, 1380–1394. [Google Scholar] [CrossRef]
- Jonas, T.; Marks, D. Estimating the snow water equivalent from snow depth data. J. Hydrol. 2016, 11, 1–4. [Google Scholar]
- Li, J.; Li, J.; Yao, K. Inundation analysis of reservoir flood based on Computer Aided Design (CAD) and Digital Elevation Model (DEM). Water 2018, 10, 530. [Google Scholar] [CrossRef]
- Masood, M.; Takeuchi, K. Assessment of flood hazard, vulnerability and risk of mid-eastern Dhaka using DEM and 1D hydrodynamic model. Nat. Hazards 2012, 61, 757–770. [Google Scholar] [CrossRef]
- Ronco, P.; Bullo, M.; Torresan, S.; Critto, A.; Olschewski, R.; Zappa, M.; Marcomini, A. KULTURisk regional risk assessment methodology for water-related natural hazards—Part 2: Application to the Zurich case study. Hydrol. Earth Syst. Sci. 2015, 19, 1561–1576. [Google Scholar] [CrossRef] [Green Version]
- Basch, C.E. Focus Group Interview: An Underutilized Research Technique for Improving Theory and Practice in Health Education. Heal. Educ. Behav. 1987, 14, 411–448. [Google Scholar] [CrossRef]
- Morgan, D. Focus groups Focus Groups. Annu. Rev. Sociol. 1996, 22, 129–152. [Google Scholar] [CrossRef]
- Kumar, R.; Acharya, P. Flood hazard and risk assessment of 2014 floods in Kashmir Valley: A space-based multisensor approach. Nat. Hazards 2016, 84, 437–464. [Google Scholar] [CrossRef]
- Unduche, F.; Tolossa, H.; Senbeta, D.; Zhu, E. Evaluation of four hydrological models for operational flood forecasting in a Canadian Prairie watershed. Hydrol. Sci. J. 2018, 63, 1133–1149. [Google Scholar] [CrossRef] [Green Version]
- Werner, M.G.F. A comparison of flood extent modelling approaches through constraining uncertainties on gauge data. Hydrol. Earth Syst. Sci. 2010, 8, 1141–1152. [Google Scholar] [CrossRef] [Green Version]
- Teng, J.; Jakeman, A.J.; Vaze, J.; Croke, B.F.W.; Dutta, D.; Kim, S. Flood inundation modelling: A review of methods, recent advances and uncertainty analysis. Environ. Model. Softw. 2017, 90, 201–216. [Google Scholar] [CrossRef]
- Judi, D.R.; Rakowski, C.L.; Waichler, S.R.; Feng, Y.; Wigmosta, M.S. Integrated modeling approach for the development of climate-informed, actionable information. Water 2018, 10, 775. [Google Scholar] [CrossRef] [Green Version]
- Pomeroy, J.W. The CRHM model: A platform for basin proees representation and model sturcuture on physical evidence. Hydrol. Process. 2007, 21, 2650–2667. [Google Scholar] [CrossRef]
- Carmona, G.; Varela-Ortega, C.; Bromley, J. Participatory modelling to support decision making in water management under uncertainty: Two comparative case studies in the Guadiana river basin, Spain. J. Environ. Manag. 2013, 128, 400–412. [Google Scholar] [CrossRef] [Green Version]
- Cockerill, K.; Tidwell, V.; Passell, H. Assessing public perceptions of computer-based models. Environ. Manag. 2004, 34, 609–619. [Google Scholar] [CrossRef] [Green Version]
- Doong, D.J.; Lo, W.; Vojinovic, Z.; Lee, W.L.; Lee, S.P. Development of a new generation of flood inundation maps-a case study of the coastal city of Tainan, Taiwan. Water 2016, 8, 521. [Google Scholar] [CrossRef] [Green Version]
- Butler, C.; Adamowski, J. Empowering marginalized communities in water resources management: Addressing inequitable practices in Participatory Model Building. J. Environ. Manag. 2015, 153, 153–162. [Google Scholar] [CrossRef]
- Olsson, J.A.; Berg, K. Local Stakeholders’ Acceptance of Model-generated Data Used as a Communication Tool in Water Management: The Rönneå Study. AMBIO A J. Hum. Environ. 2009, 34, 507–512. [Google Scholar]
- Castleden, H.E.; Hart, C.; Harper, S.; Martin, D.; Cunsolo, A.; Stefanelli, R.; Day, L.; Lauridsen, K. Implementing Indigenous and Western Knowledge Systems in Water Research and Management (Part 1): A Systematic Realist Review to Inform Water Policy and Governance in Canada. Int. Indig. Policy J. 2017, 8. [Google Scholar] [CrossRef] [Green Version]
- Bradford, L.; Waldner, C.; McLaughlin, K.; Zagozewski, R.; Bharadwaj, L. A mixed-method examination of risk factors in the truck-to-cistern drinking water system on the Beardy’s and Okemasis First Nation Reserve, Saskatchewan. Can. Water Resour. J. 2018, 43, 383–400. [Google Scholar] [CrossRef]
- Castleden, H.; Garvin, T.; First Nation, H. ay aht Modifying Photovoice for community-based participatory Indigenous research. Soc. Sci. Med. 2008, 66, 1393–1405. [Google Scholar] [CrossRef] [PubMed]
- Manttyka-Pringle, C.; Jardine, T.D.; Bradford, L.; Bharadwaj, L.; Kythreotis, A.P.; Fresque-Baxter, J.; Kelly, E.; Somers, G.; Doig, L.E.; Jones, P.D.; et al. Bridging science and traditional knowledge to assess cumulative impacts of stressors on ecosystem health. Environ. Int. 2017, 102, 125–137. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Patrick, R.; Machial, L.; Quinney, K.; Quinney, L. Lessons Learned Through Community-Engaged Planning. Int. Indig. Policy J. 2017, 8. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metadata | LiDAR DEM | ALOS/PALSAR DEM | Landsat 7 TM |
|---|---|---|---|
| Spatial Resolution | 5 m × 5 m | 12.5 m × 12.5 m | 30 m × 30 m |
| Date of acquisition | 20 June 2018 | 27 February 2019 | 3 March 2019 |
| Source | Community | https://vertex.daac.asf.alaska.edu/# | https://earthexplorer.usgs.gov/ |
| Water Depth Added (mm) | Runtime (h) | Number of Iterations to Converge |
|---|---|---|
| 10 | 1.11 | 160,000 |
| 20 | 1.25 | 168,000 |
| 42 | 2.68 | 355,000 |
| 82 | 5.59 | 711,000 |
| Water Depth | 10 mm Added | 20 mm Added | 42 mm Added | 82 mm Added | ||||
|---|---|---|---|---|---|---|---|---|
| Pixels | % area covered with water | Pixels | % area covered with water | Pixels | % area covered with water | Pixels | % area covered with water | |
| No inundation | 4,935,278 | 82.35 | 4671455 | 77.95 | 4,485,994 | 74.86 | 4,318,752 | 72.07 |
| Less than 0.5 m | 1,053,801 | 17.58 | 1,291,389 | 21.55 | 1,428,099 | 23.83 | 1,445,776 | 24.13 |
| 0.5–1 m | 3572 | 0.06 | 24,092 | 0.40 | 62,928 | 1.05 | 173,159 | 2.89 |
| 1–2 m | 130 | 0.00 | 5824 | 0.10 | 12,718 | 0.21 | 42,440 | 0.71 |
| 2–3 m | 0 | 0 | 21 | 0.00 | 3018 | 0.05 | 8332 | 0.14 |
| 3–4 m | 0 | 0 | 0 | 0 | 24 | 0.00 | 2204 | 0.04 |
| >4 m | 0 | 0 | 0 | 0 | 0 | 0 | 2118 | 0.04 |
| Total % area covered with water 1 | 17.65% | 22.05% | 25.14% | 27.93% | ||||
| WDPM Using LiDAR-DEM | WDPM Using ALOS/PALSAR DEM | Landsat 5 TM | |||||
|---|---|---|---|---|---|---|---|
| Reference depths | 10 mm | 20 mm | 42 mm | 82 mm | 42 mm | 82 mm | 19 May 2011 |
| Total Inundation area (ha) | 2643.76 | 3766.97 | 3766.97 | 4185.07 | 1610.47 | 2134.13 | 1353.60 |
| Accuracy (%) | 51.20 | 35.93 | 35.93 | 32.34 | 84.05 | 63.43 | |
| Survey Question | Very Much | Moderately | Feedback |
|---|---|---|---|
| To what extent does the evidence presented support your experience with flood concerns in the community? | 57% | 43% | Shared experiences of how in 2011 the same roads were muddy and people had difficulty getting to work. |
| To what extent do you trust the evidence? | 86% | 14% | |
| How useful do you find the evidence to address flood concerns in your community? | 86% | 14% | Use more scenarios (culverts vs. no culverts, historical events from other places, flash floods, multi-hazard impact) Need more data (LiDAR) for supporting emergency response planning |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thapa, A.; Bradford, L.; Strickert, G.; Yu, X.; Johnston, A.; Watson-Daniels, K. “Garbage in, Garbage Out” Does Not Hold True for Indigenous Community Flood Extent Modeling in the Prairie Pothole Region. Water 2019, 11, 2486. https://doi.org/10.3390/w11122486
Thapa A, Bradford L, Strickert G, Yu X, Johnston A, Watson-Daniels K. “Garbage in, Garbage Out” Does Not Hold True for Indigenous Community Flood Extent Modeling in the Prairie Pothole Region. Water. 2019; 11(12):2486. https://doi.org/10.3390/w11122486
Chicago/Turabian StyleThapa, Anuja, Lori Bradford, Graham Strickert, Xiaolei Yu, Anthony Johnston, and Kelsey Watson-Daniels. 2019. "“Garbage in, Garbage Out” Does Not Hold True for Indigenous Community Flood Extent Modeling in the Prairie Pothole Region" Water 11, no. 12: 2486. https://doi.org/10.3390/w11122486