Green Water on A Fixed Structure Due to Incident Bores: Guidelines and Database for Model Validations Regarding Flow Evolution

 ,
, 

Abstract
:1. Introduction
- (a)
- To analyse features of the air cavities formed at the beginning of the deck during the initial stages of some green water events that occur in the form of a plunging-dam-break.
- (b)
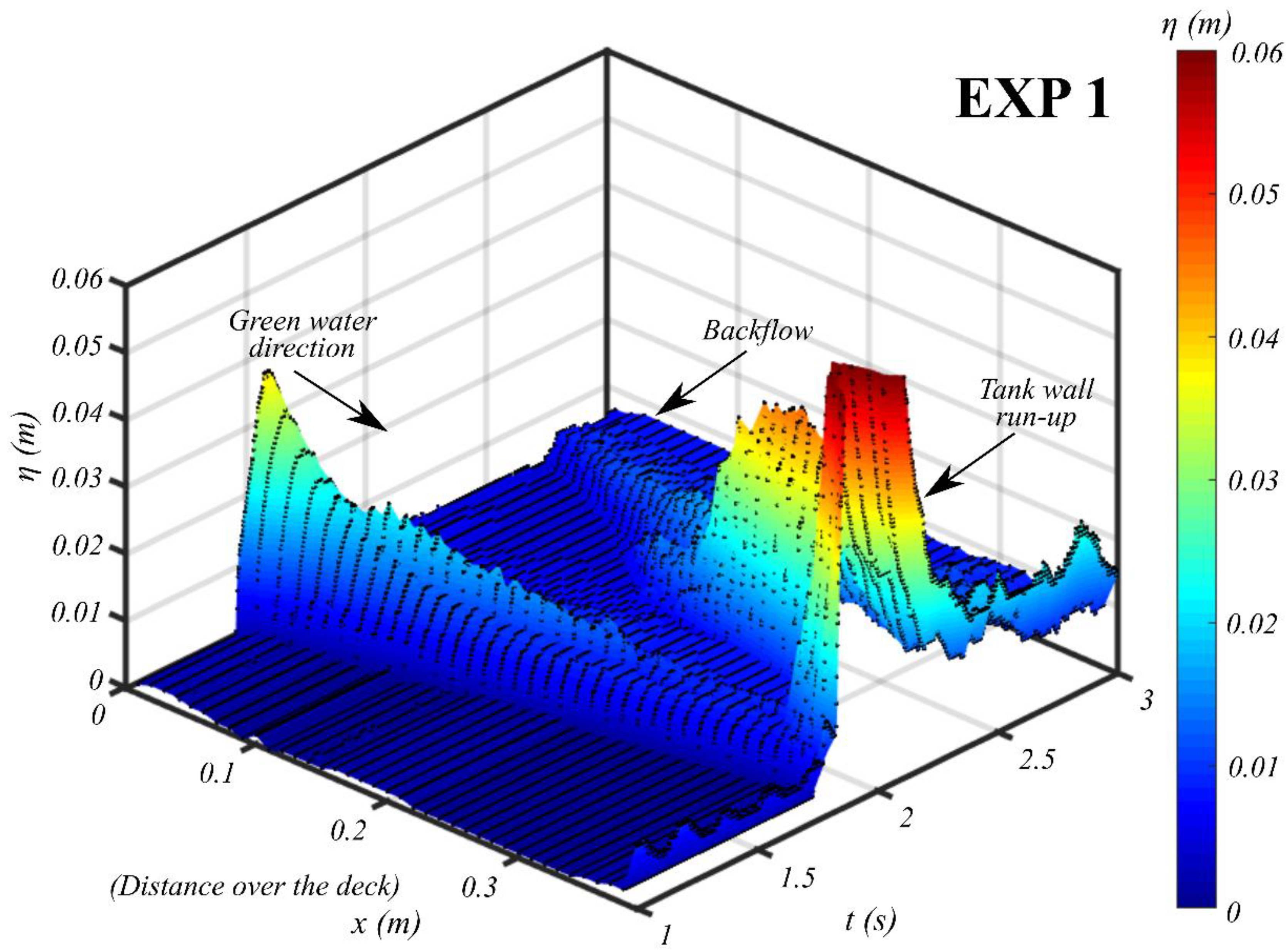
- To investigate the spatial and temporal evolution of the incident flow and the resultant water on deck of the structure, providing a database of time series of water elevations for all the study cases performed in this work, which can be employed by other authors to validate analytical or numerical models. The procedure followed to obtain these data can be very helpful to analyse green water elevations in other two-dimensional applications, which until now, have generally been measured at only a few positions, by obstructive wave probes.
- (c)
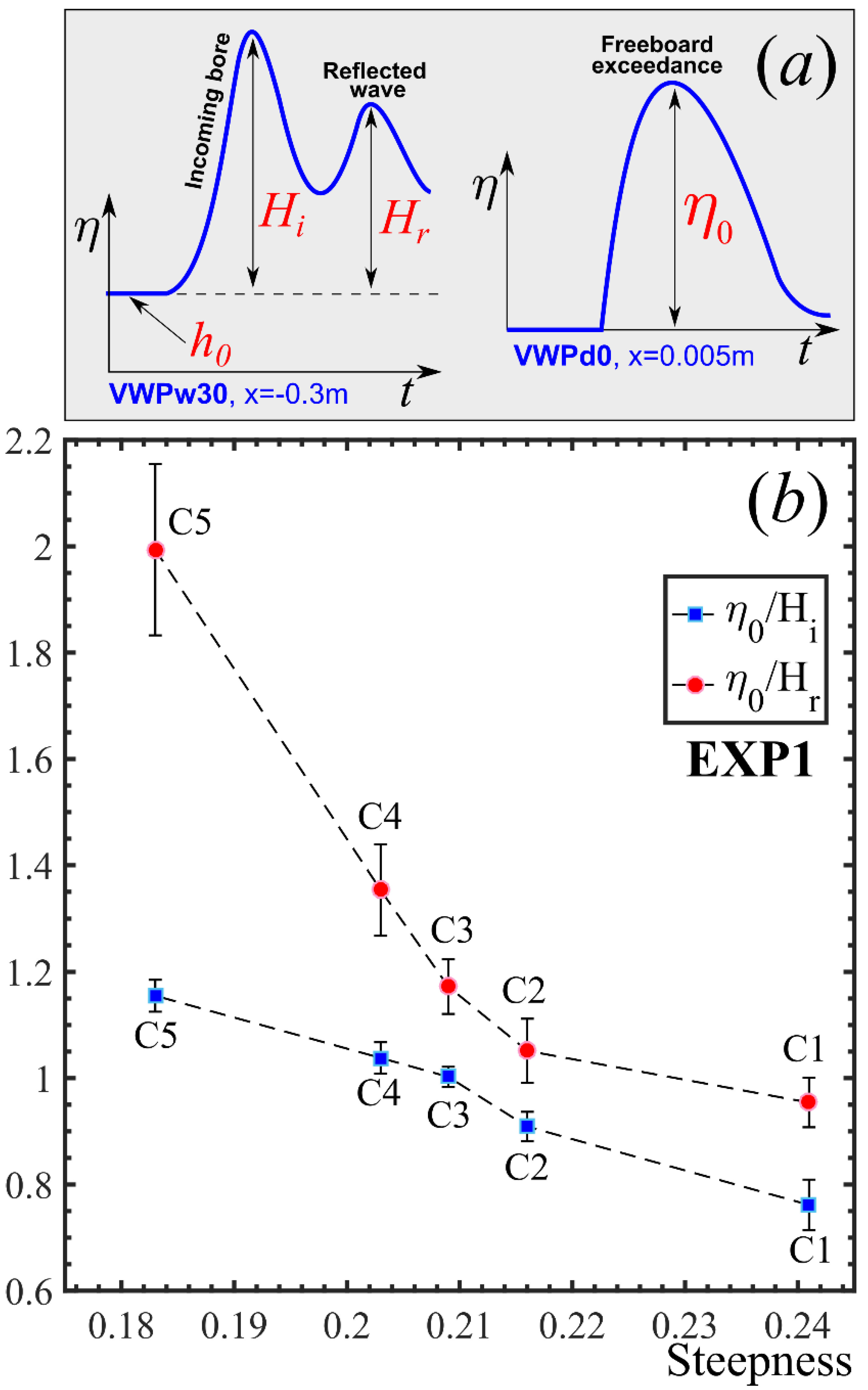
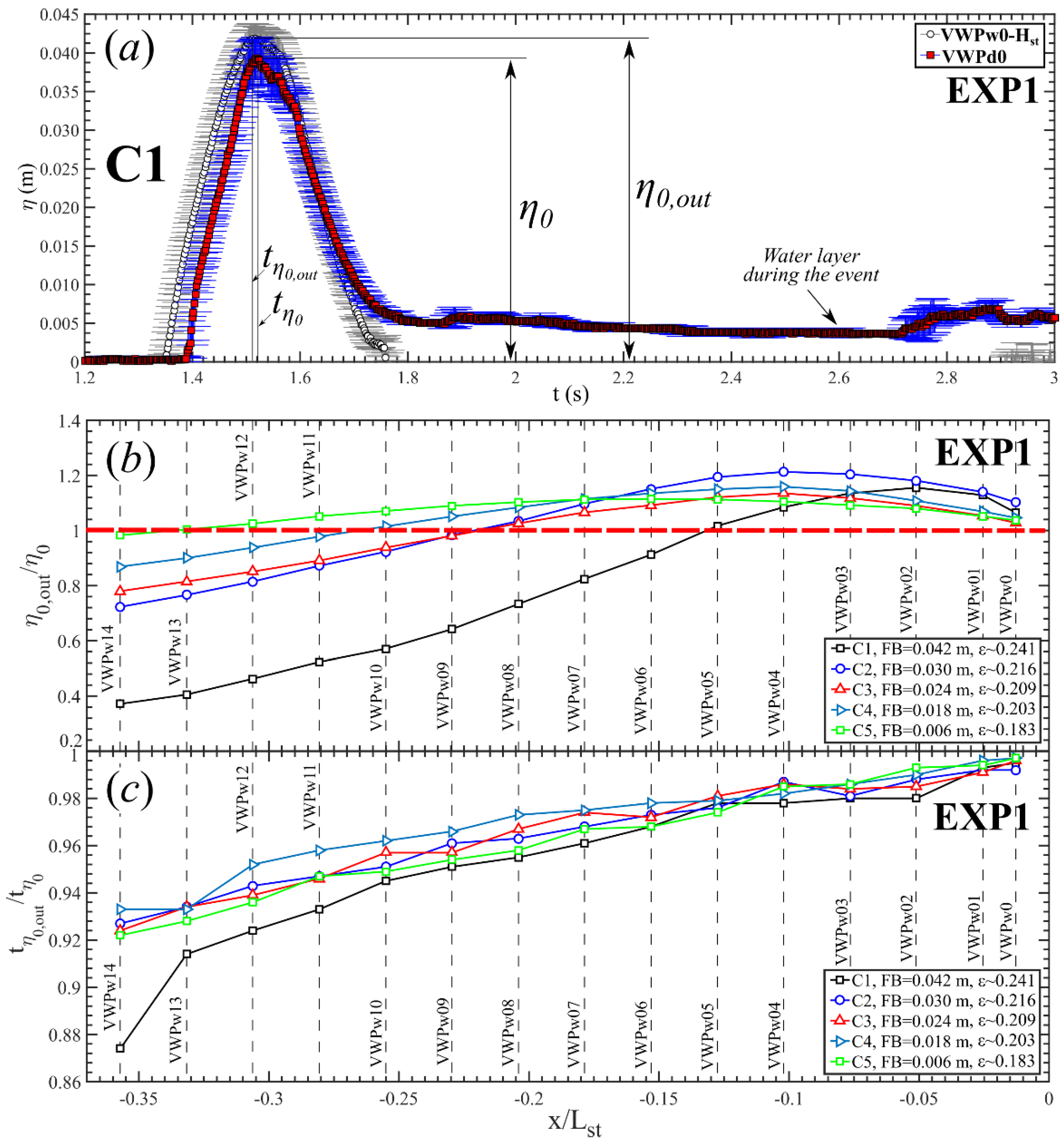
- To analyse the difference between selecting the freeboard exceedance at the bow or an upstream position, including the relationship existing between the freeboard exceedance and the incident bores. This parameter is of significant relevance in performing model implementations, then the approach followed here may be useful to evaluate adequate safety factors to predict the real amount of water on deck.
- (d)
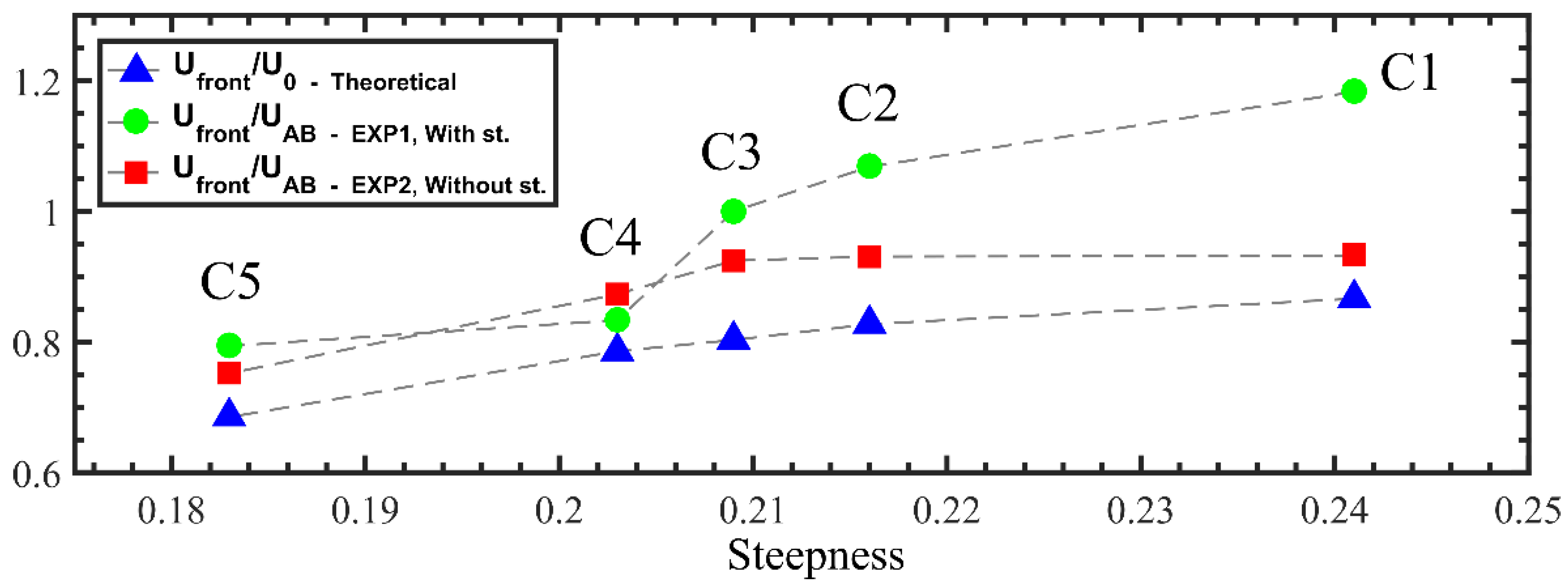
- To verify the relationship between the kinematics of green water with that of the incident bore, including the influence of the presence of the structure.
2. The Theoretical Wet Dam-Break Approach
3. Experimental Methods
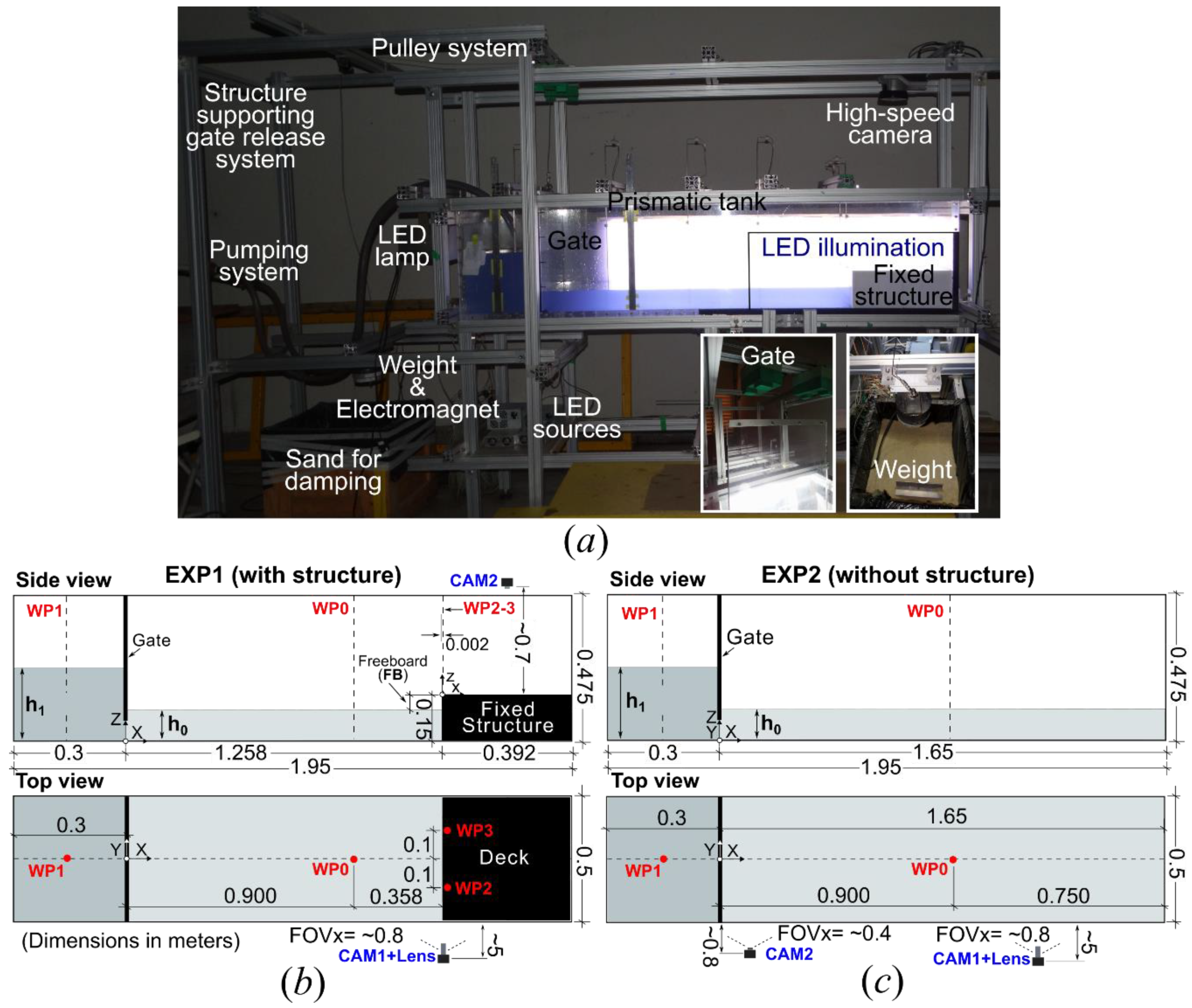
3.1. Experimental Set-Up
3.2. Study Cases
3.3. Conventional Wave Probe Measurements
3.4. Image-Based Measurements
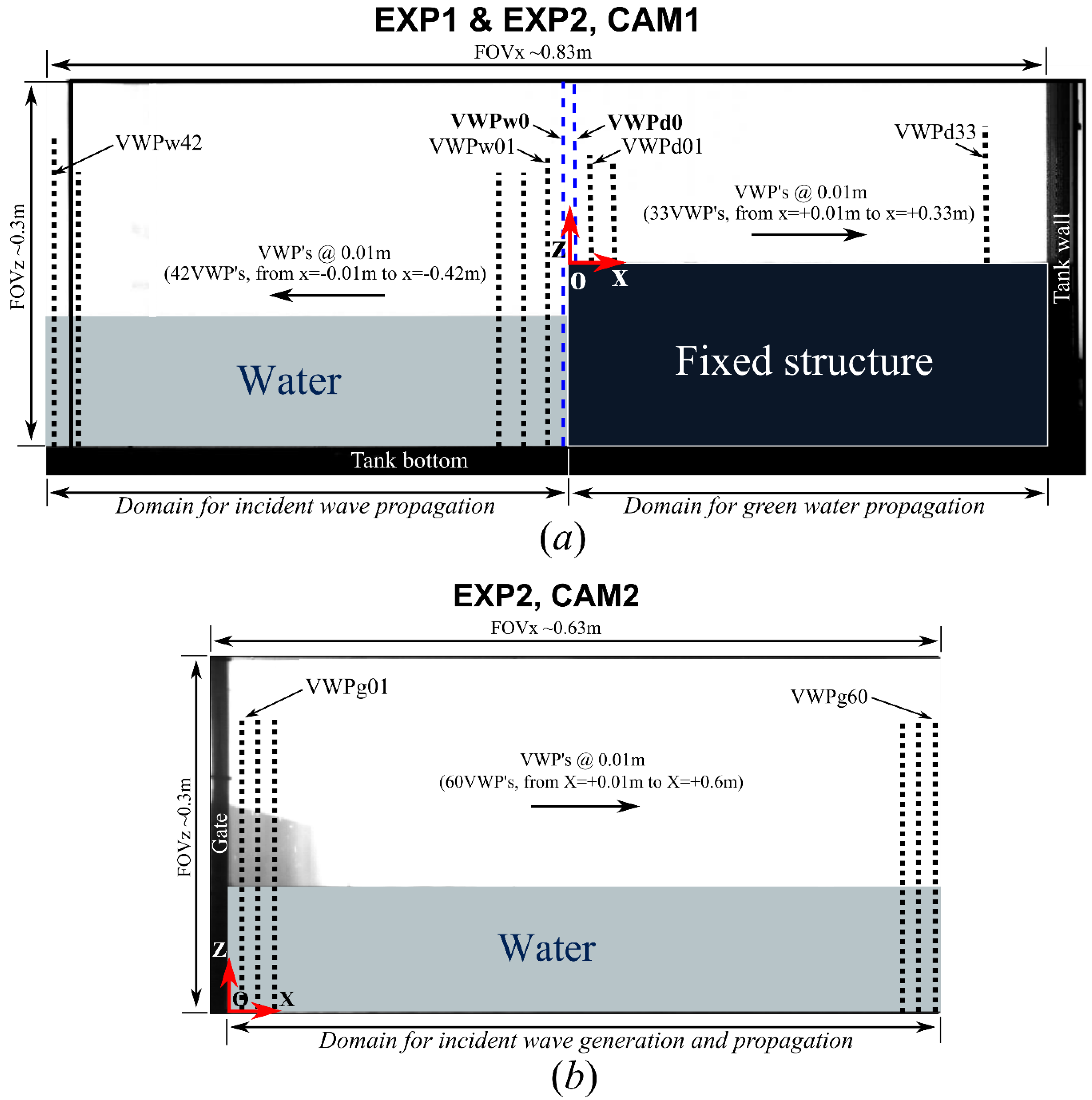
3.4.1. Water Elevation Measurements
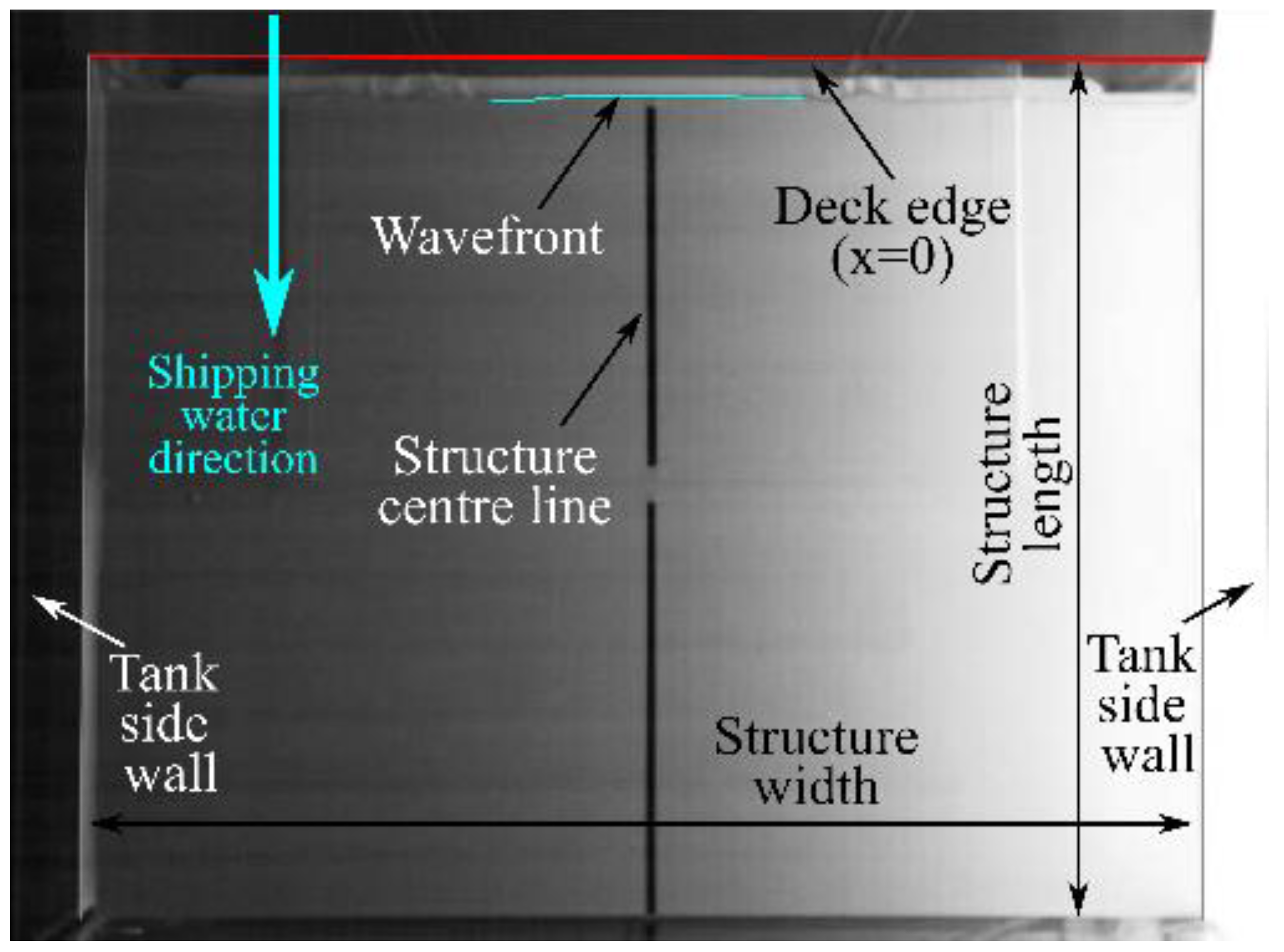
3.4.2. Wavefront Velocity
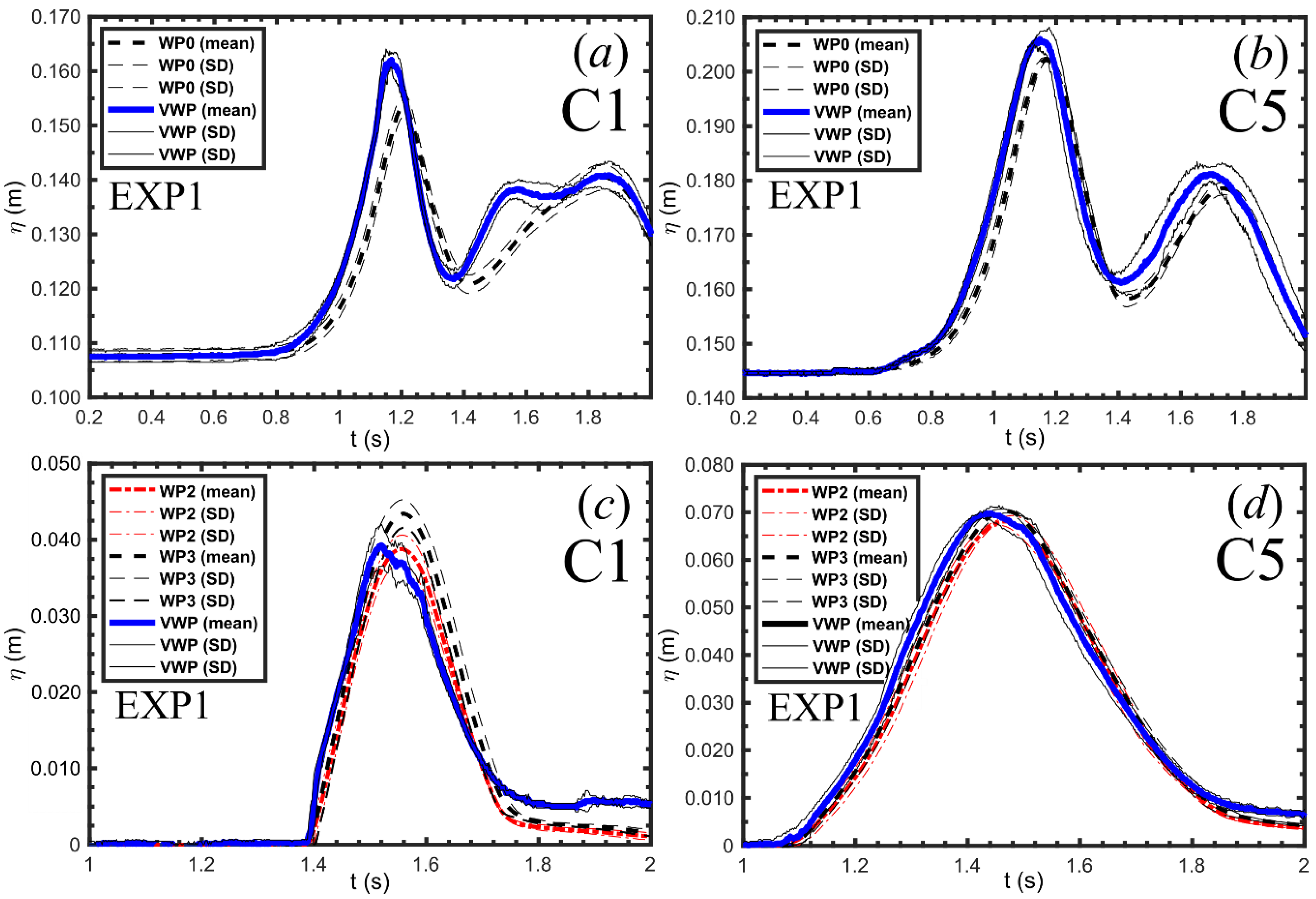
4. Comparison of Conventional and Virtual Wave Probes
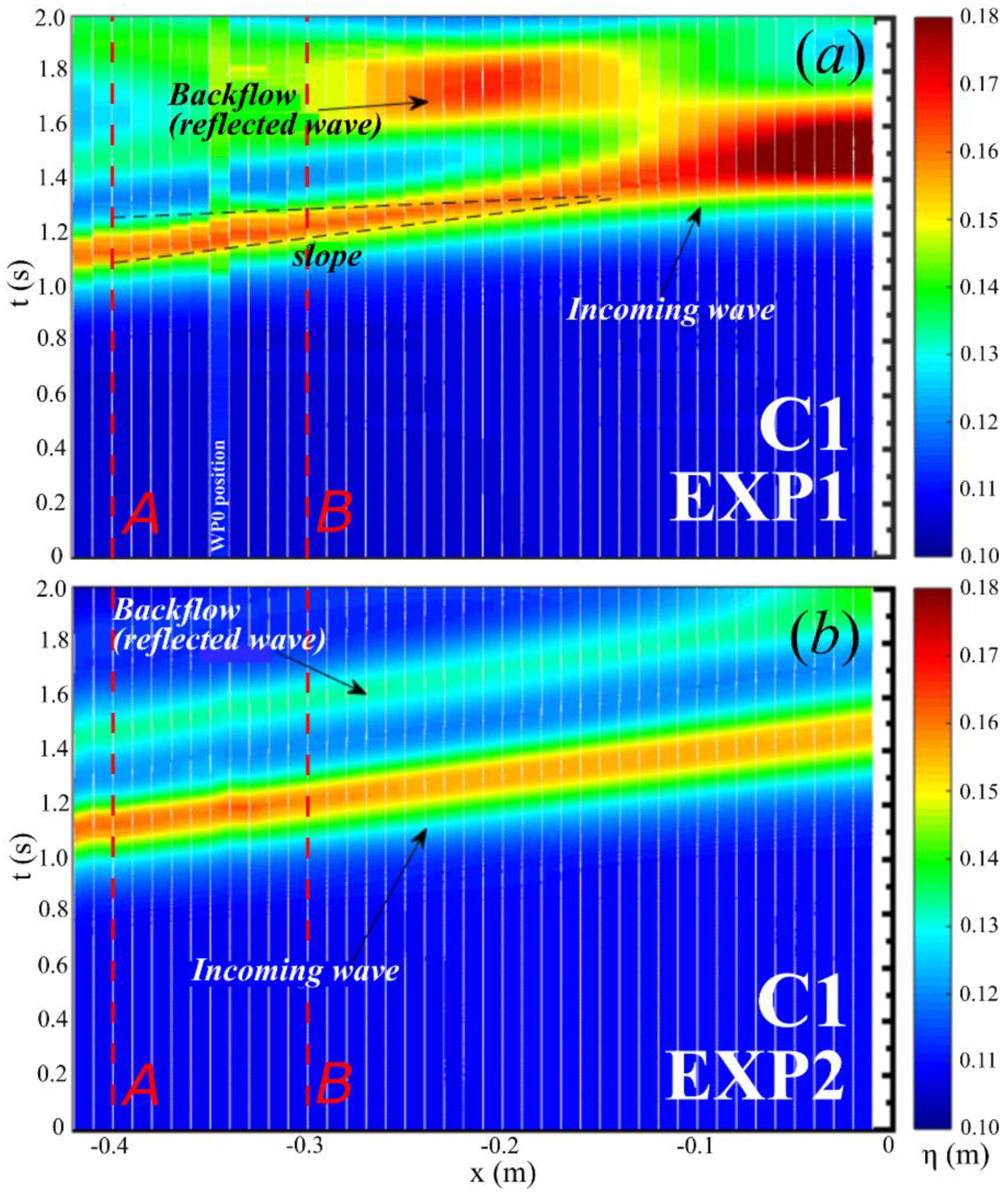
5. Propagation and Characterization of the Bores
5.1. Gate Aperture
5.2. Bore Propagation
5.3. Bore Steepness
6. Interaction of Bores with the Structure: Green Water
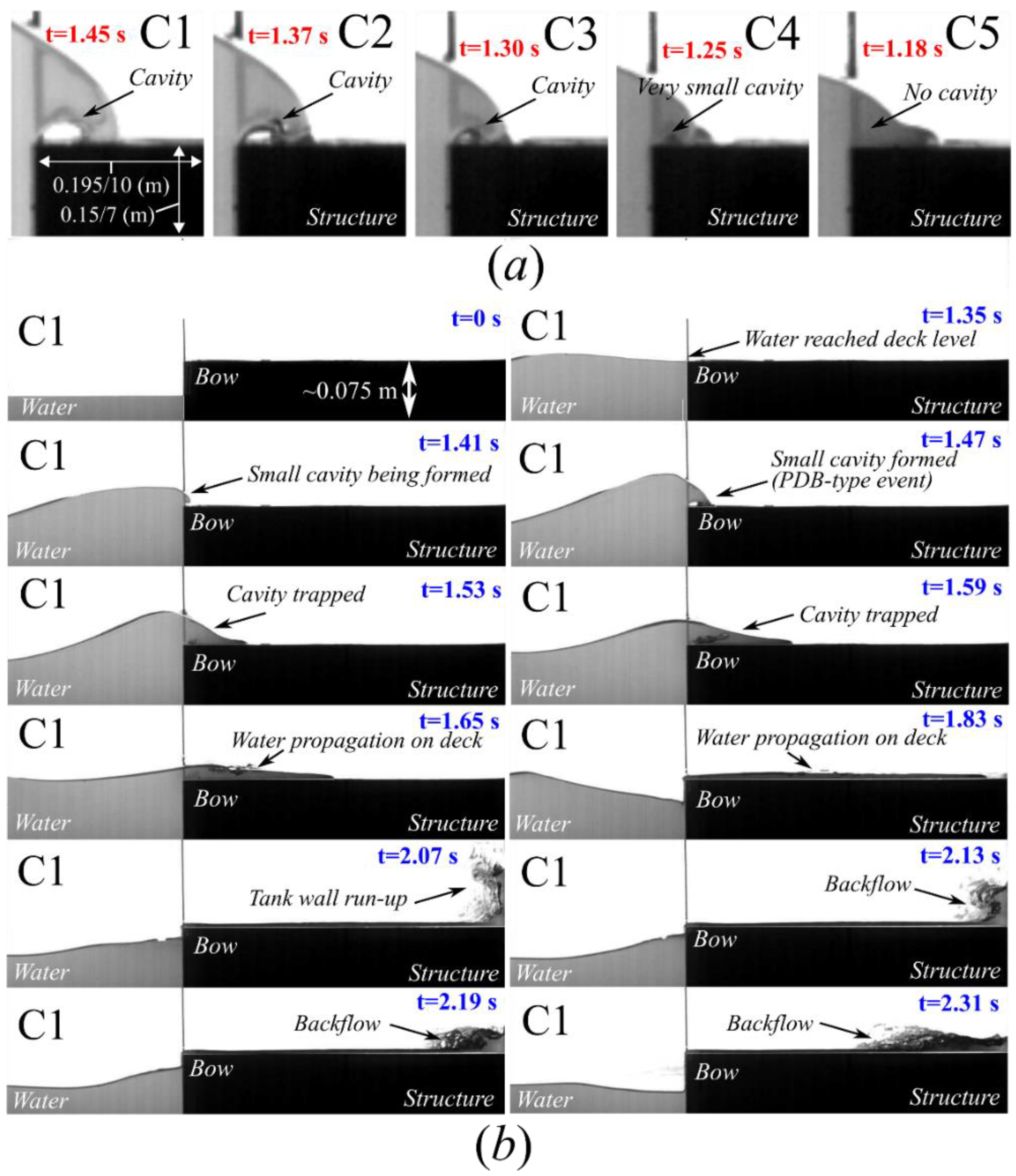
6.1. The Green Water Events
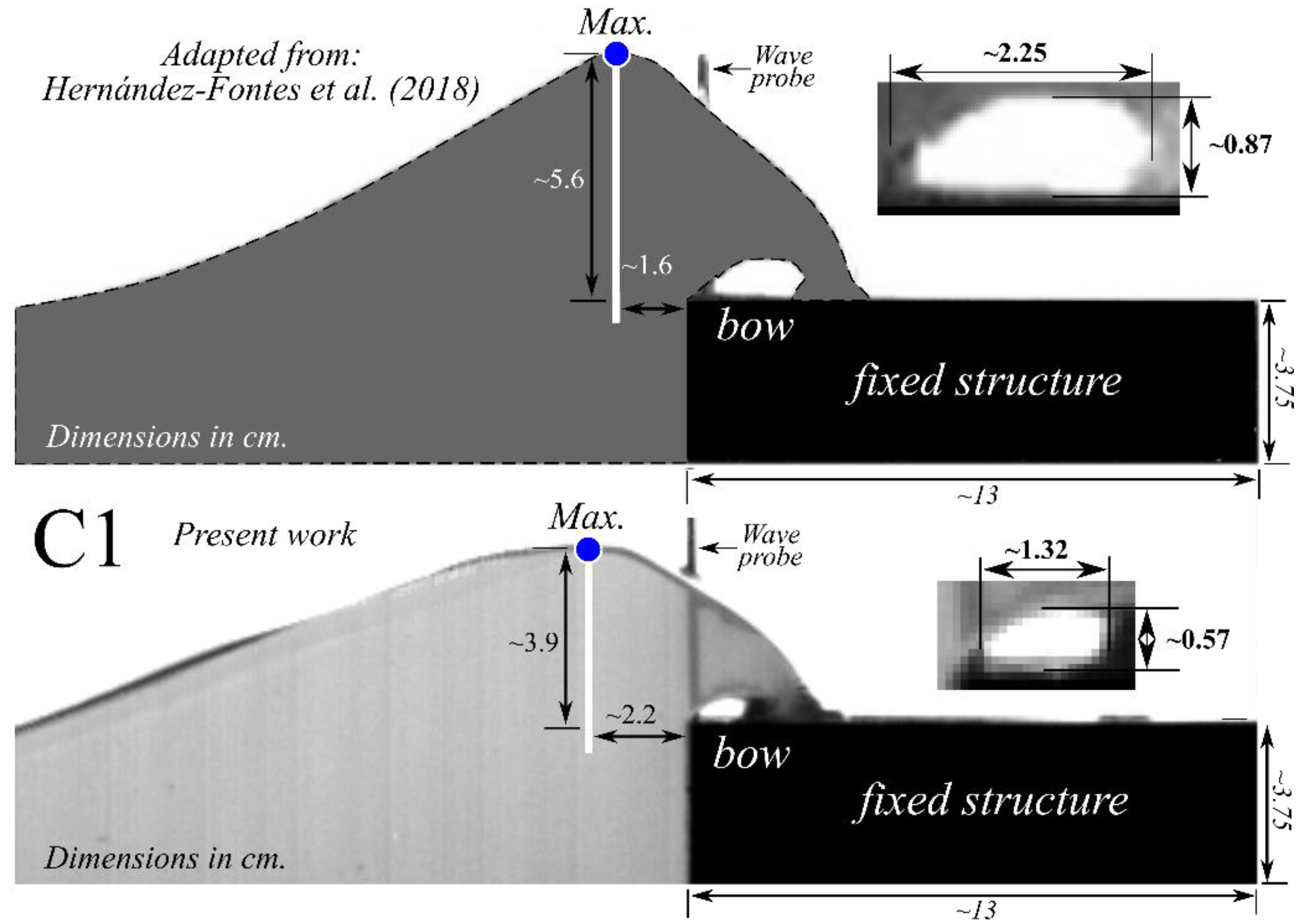
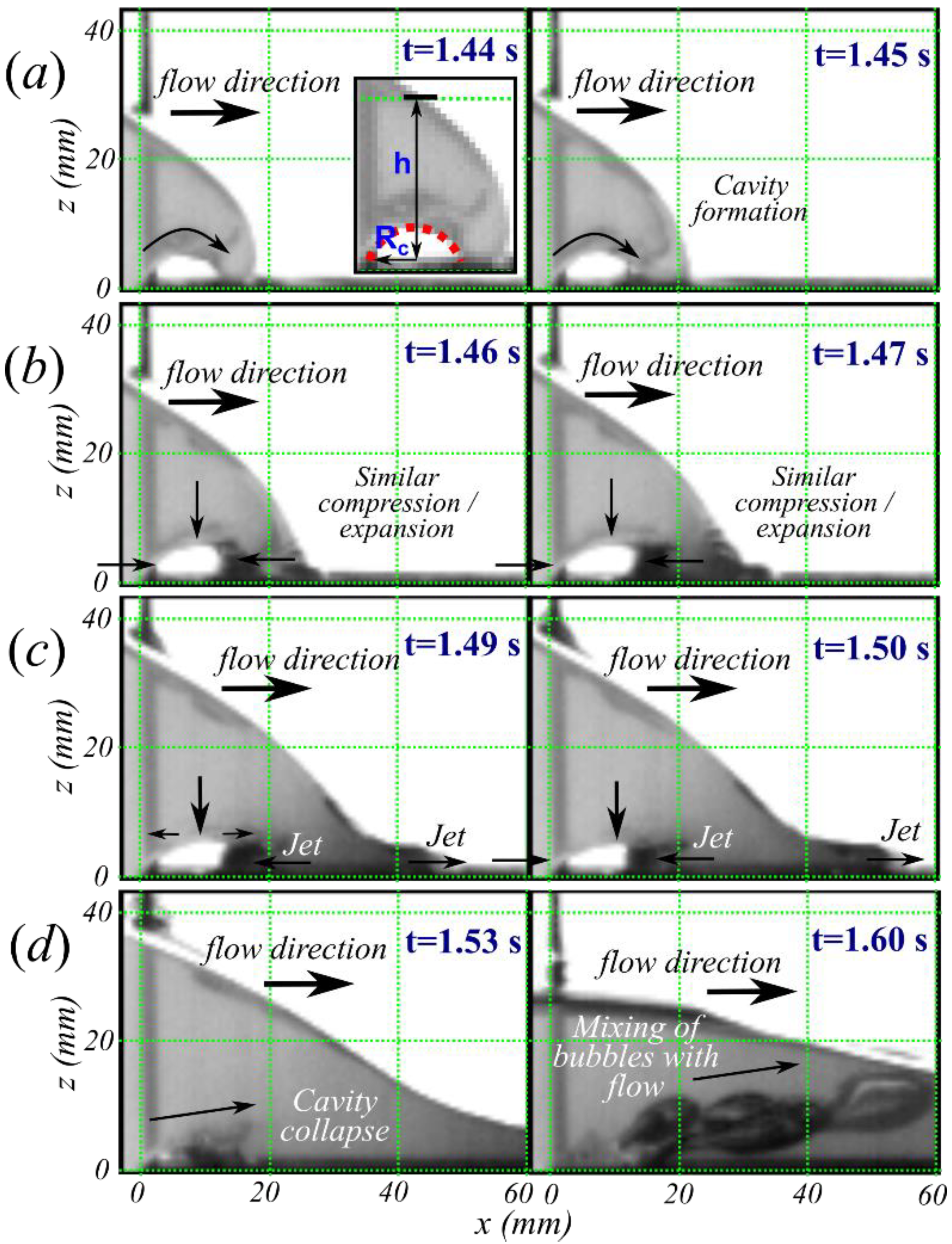
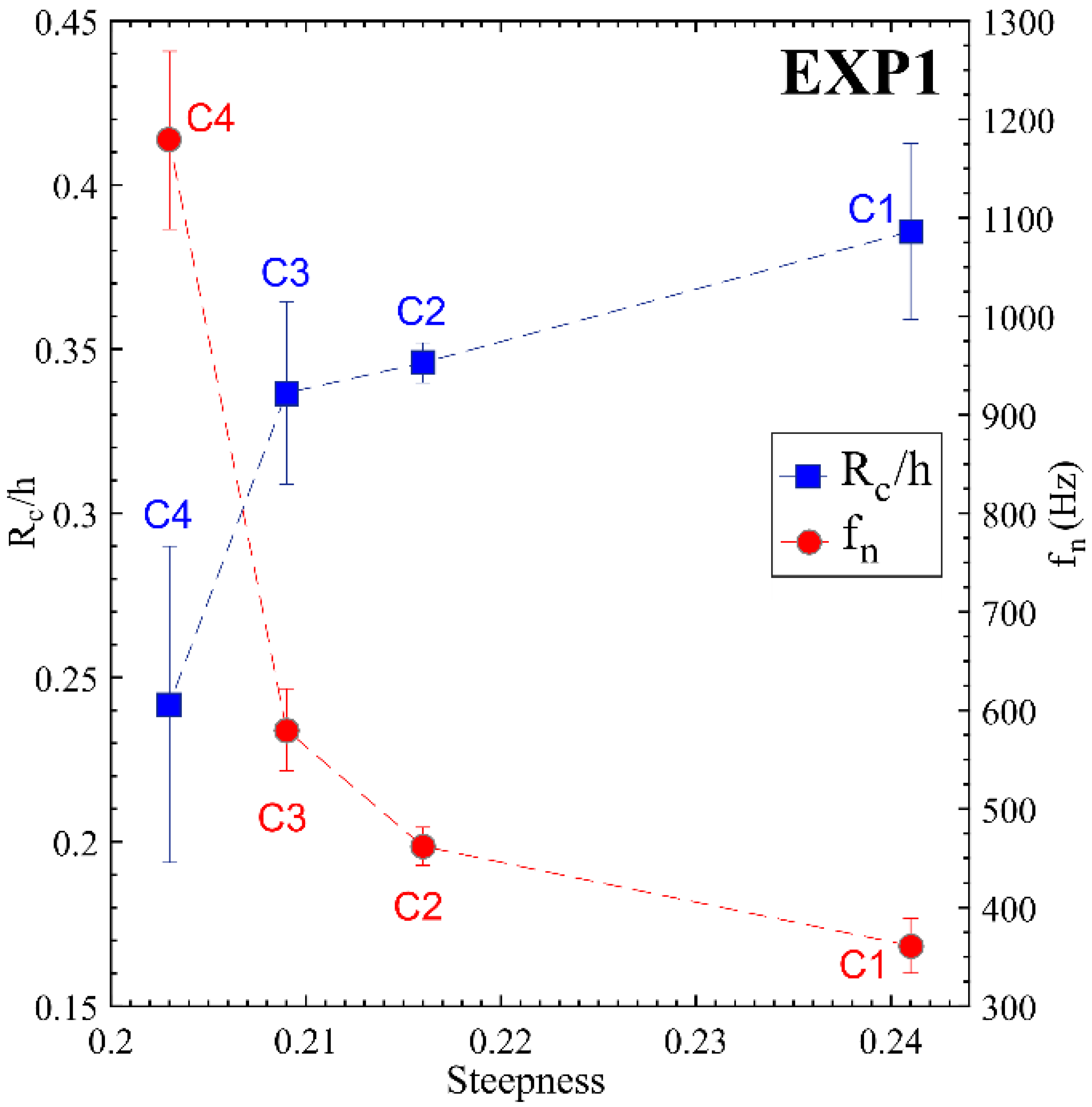
Air Cavity Analysis
- (1)
- The air cavity is entrapped against a horizontal surface rather than a vertical wall (Figure 9a).
- (2)
- The deformation of the air cavity (i.e., compression and expansion) is very similar in the horizontal and vertical direction, that is, it suffers an isotropic compression and expansion (Figure 9b).
- (3)
- The air-cavity deformation occurs mainly in the horizontal direction, that is, it presents an anisotropic compression/expansion due to the increase in the water column above it. However, in the present case, the cavity is also reduced by the effect of the backward jet that is formed as water propagates down the deck (Figure 9c).
- (4)
- The air cavity collapses and fragments in small bubbles that mix downstream with the advancing flow (Figure 9d).
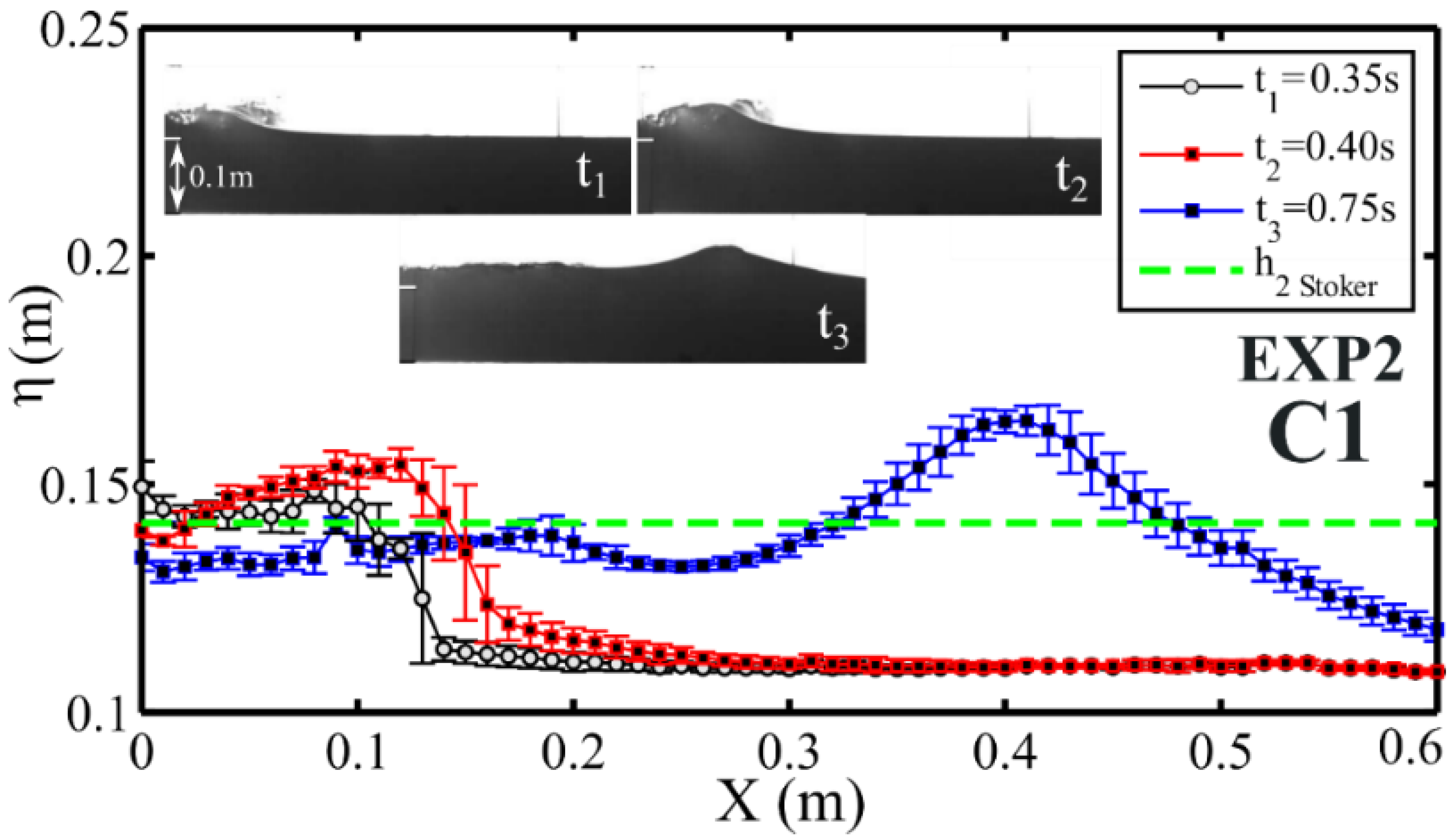
6.2. Green Water Elevations
Freeboard Exceedance
6.3. Green Water Kinematics
7. Conclusions
- -
- Five different study cases were performed, considering the same wet dam-break ratio h0/h1 = 0.6 and five different freeboards (0.006 ≤ FB ≤ 0.042). These conditions generated undular bores with similar heights (0.055–0.060 m for all cases) and theoretical steepnesses in the range 0.183–0.241. These bores generated four green water events with small cavities formed at the beginning of the deck (PDB-types of green water) for the steeper bores and a case where no cavity was observed (DB-type of green water) for the longest bore. Some concepts used to analyse the cavities formed in flip-through events in vertical walls were introduced in the present work to practically describe the evolution of the PDB cavity in a practical way.
- -
- The consideration of the maximum freeboard exceedance (η0) is important in the implementation of analytical and numerical models. In this study, it was verified that selecting η0 at some distances outside the deck may yield differences with respect to the one measured at the bow. It is suggested that for applications in which the relative wave-deck motions were considered outside the deck, a correction factor should be estimated and included to approximate the real freeboard exceedance that occurs at the edge of the deck, considering also its time of occurrence, which is relevant to green water simulations.
- -
- The proposed experimental setup allowed the use of image-based methods available in the literature to analyse the temporal and spatial evolution of the incident wave and green water on deck in a two-dimensional framework. This is an advantage over traditional techniques that employ obstructive wave probes over the deck to monitor green water elevations at a few positions. Regarding these results, a database of water elevations has been made available to allow model validations by other authors. These include time series of water elevations for the five repetitions of the five study cases, considering the experiments with and without the fixed structure. The database was made available in a Mendeley data repository: http://dx.doi.org/10.17632/zjrsmffh4d.1 as Supplementary Materials.
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Greco, M. A Two-dimensional Study of Green-Water Loading; Norwegian University of Science and Technology: Trondheim, Norway, 2001. [Google Scholar]
- Buchner, B. Green Water On Ship-Type Offshore Structures; Delft University of Technology: Delft, The Netherlands, 2002. [Google Scholar]
- Hernández-Fontes, J.V.; Vitola, M.A.; Esperança, P.T.T.; Sphaier, S.H. An alternative for estimating shipping water height distribution due to green water on a ship without forward speed. Mar. Syst. Ocean Technol. 2015, 10, 38–46. [Google Scholar] [CrossRef]
- Ogawa, T.; Taguchi, H.; Ishida, S. Experimental study on shipping water volume and its load on deck. J. Soc. Nav. Archit. Jpn. 1997, 182, 177–185. [Google Scholar] [CrossRef]
- Nielsen, K.B.; Mayer, S. Numerical prediction of green water incidents. Ocean Eng. 2004, 31, 363–399. [Google Scholar] [CrossRef]
- Silva, D.F.C.; Esperança, P.T.T.; Coutinho, A.L.G.A. Green water loads on FPSOs exposed to beam and quartering seas, Part II: CFD simulations. Ocean Eng. 2017, 140, 434–452. [Google Scholar] [CrossRef]
- Greco, M.; Colicchio, G.; Faltinsen, O.M. Shipping of water on a two-dimensional structure. Part 2. J. Fluid Mech. 2007, 581, 371–399. [Google Scholar] [CrossRef]
- Barcellona, M.; Landrini, M.; Greco, M.; Faltinsen, O.M. An experimental investigation on bow water shipping. J. Sh. Res. 2003, 47, 327–346. [Google Scholar]
- Lee, H.H.; Lim, H.J.; Rhee, S.H. Experimental investigation of green water on deck for a CFD validation database. Ocean Eng. 2012, 42, 47–60. [Google Scholar] [CrossRef]
- Ryu, Y.; Chang, K.A.; Mercier, R. Application of dam-break flow to green water prediction. Appl. Ocean Res. 2007, 29, 128–136. [Google Scholar] [CrossRef]
- Song, Y.K.; Chang, K.A.; Ariyarathne, K.; Mercier, R. Surface velocity and impact pressure of green water flow on a fixed model structure in a large wave basin. Ocean Eng. 2015, 104, 40–51. [Google Scholar] [CrossRef]
- Van Veer, R.; Boorsma, A. Towards an improved understanding of green water exceedance. In Proceedings of the ASME 2016 35th International Conference on Ocean, Offshore and Arctic Engineering OMAE 2016, Busan, Korea, 19–24 June 2016; pp. 1–10. [Google Scholar]
- Ryu, Y.; Chang, K.A.; Mercier, R. Runup and green water velocities due to breaking wave impinging and overtopping. Exp. Fluids 2007, 43, 555–567. [Google Scholar] [CrossRef]
- Hernández-Fontes, J.V.; Vitola, M.A.; Silva, M.C.; Esperança, P.T.T.; Sphaier, S.H. Use of wet dam-break to study green water problem. In Proceedings of the ASME 2017 36th International Conference on Ocean, Offshore and Arctic Engineering OMAE 2016, Tondrheim, Norway, 25–30 June 2017. [Google Scholar]
- Hernández-Fontes, J.V.; Vitola, M.A.; Silva, M.C.; Esperança, P.D.T.T.; Sphaier, S.H. On the generation of isolated green water events using wet dam-break. J. Offshore Mech. Arct. Eng. 2018, 140. [Google Scholar] [CrossRef]
- Stoker, J.J. Water Waves: Pure and Applied Mathematics; Interscience Publishers: New York, NY, USA, 1957. [Google Scholar]
- Binnie, A.M.; Davies, P.O.A.L.; Orkney, J.C. Experiments on the flow of water from a reservoir through an open horizontal channel I. The production of a uniform stream. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1955, 230, 225–236. [Google Scholar]
- Ritter, A. Die fortpflanzung der wasserwellen. Zeitschrift des Vereines Deutscher Ingenieure 1892, 36, 947–954. [Google Scholar]
- Nakagawa, H.; Nakamura, S.; Ichihashi, K. Generation and Development of a Hydraulic Bore Due to the Breaking of a Dam; Bulletin of the Disaster Prevention Research Institute, Kyoto University: Kyoto, Japan, 1969; Volume 19. [Google Scholar]
- Stansby, P.K.; Chegini, A.; Barnes, T.C.D. The initial stages of dam-break flow. J. Fluid Mech. 1998, 374, 407–424. [Google Scholar] [CrossRef]
- Ozmen-Cagatay, H.; Kocaman, S. Dam-break flows during initial stage using SWE and RANS approaches. J. Hydraul. Res. 2010, 48, 603–611. [Google Scholar] [CrossRef]
- Oertel, M.; Bung, D.B. Initial stage of two-dimensional dam-break waves: Laboratory versus VOF. J. Hydraul. Res. 2012, 50, 89–97. [Google Scholar] [CrossRef]
- Kocaman, S.; Ozmen-Cagatay, H. Investigation of dam-break induced shock waves impact on a vertical wall. J. Hydrol. 2015, 525, 1–12. [Google Scholar] [CrossRef]
- Hernández-Fontes, J.V.; Vitola, M.A.; Esperança, P.D.T.T.; Sphaier, S.H. Analytical convolution model for shipping water evolution on a fixed structure. Appl. Ocean Res. 2019, 82, 415–429. [Google Scholar] [CrossRef]
- Hernández-Fontes, J.V.; Vitola, M.A.; Esperança, P.D.T.T.; Sphaier, S.H. Assessing shipping water vertical loads on a fixed structure by convolution model and wet dam-break tests. Appl. Ocean Res. 2019, 82, 63–73. [Google Scholar] [CrossRef]
- Kocaman, S.; Ozmen-Cagatay, H. The effect of lateral channel contraction on dam break flows: Laboratory experiment. J. Hydrol. 2012, 432–433, 145–153. [Google Scholar] [CrossRef]
- Yeh, H.H.; Ghazali, A.; Marton, I. Experimental study of bore run-up. J. Fluid Mech. 1989, 206, 563–578. [Google Scholar] [CrossRef]
- Hernández-Fontes, J.V. An Analytical and Experimental Study of Shipping Water Evolution and Related Vertical Loading. Ph.D. Thesis, COPPE, Federal University of Rio de Janeiro, Janeiro, Brazil, 2018. [Google Scholar]
- Hernández, I.D.; Hernández-Fontes, J.V.; Vitola, M.A.; Silva, M.C.; Esperança, P.T.T. Water elevation measurements using binary image analysis for 2D hydrodynamic experiments. Ocean Eng. 2018, 157, 325–338. [Google Scholar] [CrossRef]
- Hager, W.H.; Lauber, G. Hydraulische experimente zum talsperren bruchproblem (hydraulic experiments to dambreak problem). Schweizer Ing. und Archit. 1996, 114, 515–524. [Google Scholar]
- Lauber, G.; Hager, W.H. Experiments to dambreak wave: Horizontal channel. J. Hydraul. Res. 1998, 36, 291–307. [Google Scholar] [CrossRef]
- Shigematsu, T.; Liu, P.L.-F.; Oda, K. Numerical modeling of the initial stages of dam-break waves. J. Hydraul. Res. 2004, 42, 183–195. [Google Scholar] [CrossRef]
- Liu, H.; Liu, H. Experimental study on dam-break hydrodynamic characteristics under different conditions. J. Disaster Res. 2017, 12, 198–207. [Google Scholar] [CrossRef]
- Daily, J.W.; Stephan, S.C. The solitary wave. Coast. Eng. Proc. 1952, 1, 2. [Google Scholar]
- Goring, D.G. Tsunamis: The Propagation of Long Waves onto A Shelf; California Institute of Technology: Pasadena, CA, USA, 1979; Volume 1979. [Google Scholar]
- Silva, R.; Losada, I.J.; Losada, M.A. Reflection and transmission of tsunami waves by coastal structures. Appl. Ocean Res. 2000, 22, 215–223. [Google Scholar] [CrossRef]
- Lugni, C.; Brocchini, M.; Faltinsen, O.M. Wave impact loads: The role of the flip-through. Phys. Fluids 2006, 18, 122101. [Google Scholar] [CrossRef]
- Colicchio, G.; Greco, M.; Faltinsen, O.M. Domain-decomposition strategy for marine applications with cavity entrapments. J. Fluids Struct. 2011, 27, 567–585. [Google Scholar] [CrossRef]
- Lugni, C.; Miozzi, M.; Brocchini, M.; Faltinsen, O.M. Evolution of the air cavity during a depressurized wave impact. I. The kinematic flow field. Phys. Fluids 2010, 22, 1–17. [Google Scholar] [CrossRef]
- Lugni, C.; Brocchini, M.; Faltinsen, O.M. Evolution of the air cavity during a depressurized wave impact. II. The dynamic field. Phys. Fluids 2010, 22, 1–13. [Google Scholar] [CrossRef]
- Peregrine, D.H.; Topliss, M.E. The pressure field due to steep water waves incident on a vertical wall. In Proceedings of the 24th International Conference on Coastal Engineering (ASCE, Kobe, 1994), Kobe, Japan, 23–28 October 1994; pp. 1496–1510. [Google Scholar]
- Ogawa, Y. Long-term prediction method for the green water load and volume for an assessment of the load line. J. Mar. Sci. Technol. 2003, 7, 137–144. [Google Scholar] [CrossRef]
- Hu, Z.; Xue, H.; Tang, W.; Zhang, X. A combined wave-dam-breaking model for rogue wave overtopping. Ocean Eng. 2015, 104, 77–88. [Google Scholar] [CrossRef]
- Buchner, B. On the impact of green water loading. In Proceedings of the Sixth International Symposium on Practical Design of Ships and Mobile Units, PRADS 1995, Seoul, Korea, 17–22 September 1995. [Google Scholar]
- Silva, D.F.C.; Coutinho, A.L.G.A.; Esperança, P.T.T. Green water loads on FPSOs exposed to beam and quartering seas, part I: Experimental tests. Ocean Eng. 2017, 140, 419–433. [Google Scholar] [CrossRef]
- Buchner, B. Green water from the side of an weathervaning FPSO. In Proceedings of the OMAE99, 18th International Conference on Offshore Mechanics and Arctic Engineering, St. Johns, NL, Canada, 11–16 July 1999; pp. 1–11. [Google Scholar]
- Buchner, B. The impact of green water on FPSO design. In Proceedings of the 27th Offshore Technology Conference, OTC, Houston, TX, USA, 1–4 May 1995; pp. 45–57. [Google Scholar]
- Fonseca, N.; Pascoal, R.; Guedes Soares, C.; Clauss, G.; Schmittner, C. Numerical and experimental analysis of extreme wave induced vertical bending moments on a FPSO. Appl. Ocean Res. 2010, 32, 374–390. [Google Scholar] [CrossRef]
- Xiao, L.; Tao, L.; Yang, J.; Li, X. An experimental investigation on wave runup along the broadside of a single point moored FPSO exposed to oblique waves. Ocean Eng. 2014, 88, 81–90. [Google Scholar] [CrossRef]
- Xiao, L.; Yang, J.; Tao, L.; Li, X. Shallow water effects on high order statistics and probability distributions of wave run-ups along FPSO broadside. Mar. Struct. 2015, 41, 1–19. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | h0/h1 | h0 (in m) | h1 (in m) | FB (in m) |
|---|---|---|---|---|
| C1 | 0.6 | 0.108 | 0.180 | 0.042 |
| C2 | 0.6 | 0.120 | 0.200 | 0.030 |
| C3 | 0.6 | 0.126 | 0.210 | 0.024 |
| C4 | 0.6 | 0.132 | 0.220 | 0.018 |
| C5 | 0.6 | 0.144 | 0.240 | 0.006 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hernández-Fontes, J.V.; Esperança, P.d.T.T.; Graniel, J.F.B.; Sphaier, S.H.; Silva, R. Green Water on A Fixed Structure Due to Incident Bores: Guidelines and Database for Model Validations Regarding Flow Evolution. Water 2019, 11, 2584. https://doi.org/10.3390/w11122584
Hernández-Fontes JV, Esperança PdTT, Graniel JFB, Sphaier SH, Silva R. Green Water on A Fixed Structure Due to Incident Bores: Guidelines and Database for Model Validations Regarding Flow Evolution. Water. 2019; 11(12):2584. https://doi.org/10.3390/w11122584
Chicago/Turabian StyleHernández-Fontes, Jassiel V., Paulo de Tarso T. Esperança, Juan F. Bárcenas Graniel, Sergio H. Sphaier, and Rodolfo Silva. 2019. "Green Water on A Fixed Structure Due to Incident Bores: Guidelines and Database for Model Validations Regarding Flow Evolution" Water 11, no. 12: 2584. https://doi.org/10.3390/w11122584